Deel II – Afleiding Algemene Relativiteitstheorie
2 Algemene Relativiteitstheorie
Voordat Einstein in 1915 zijn beroemde algemene relativiteitstheorie formuleerde, ontwikkelde hij in 1905 eerst de speciale relativiteitstheorie (zie Appendix 9 ). In deze theorie beschouwde hij uitsluitend coördinatenstelsels die zich uniform bewegen, dat wil zeggen met constante snelheid ten opzichte van elkaar. De invloed van massa's, en dus zwaartekracht, werd daarin nog buiten beschouwing gelaten.
De speciale relativiteitstheorie is gebaseerd op twee fundamentele uitgangspunten:
- De lichtsnelheid in vacuüm is in elk coördinatenstelsel gelijk en bedraagt: \( c = 299\,792\,458 \, \text{m/s} \).
- De natuurwetten zijn geldig in elk inert (niet versnellend) bewegend coördinatenstelsel.
In de klassieke theorie van Newton werd aangenomen dat de tijd universeel is: tijdsintervallen zijn gelijk in zowel stilstaande als bewegende stelsels. De speciale relativiteitstheorie toonde echter aan dat dit niet klopt. In een bewegend stelsel verlopen de tijdsintervallen langzamer dan in een stilstaand stelsel, een effect dat bekend staat als tijddilatatie.
Ook de lengte van een object verandert onder invloed van beweging: deze neemt af ten opzichte van de oorspronkelijke lengte in rust. Dit effect heet lengtecontractie. Beide verschijnselen worden uitgebreid behandeld in Appendix 9 .
Deze resultaten zijn directe consequenties van het feit dat de lichtsnelheid constant is voor alle waarnemers, ongeacht hun snelheid. Omdat tijd en ruimte afhankelijk blijken te zijn van het gekozen stelsel, verenigde Einstein deze grootheden in één geheel: de ruimte-tijd.
Een van de bekendste uitkomsten van deze theorie is de beroemd geworden massa-energierelatie:
waarin energie en massa als equivalent worden beschouwd (zie Appendix 9.9 ). In een volgend stadium richtte Einstein zich op een uitbreiding van zijn theorie naar versnelde stelsels en de invloed van massa’s. Dit leidde in 1915 tot de formulering van de algemene relativiteitstheorie, waarin zwaartekracht niet langer als een kracht wordt beschouwd, maar als een gevolg van de kromming van de ruimte-tijd.
Voor een eerste indruk van de uiteindelijke veldvergelijkingen van Einstein verwijzen we naar hoofdstuk 2.16 , waar een samenvatting van de eindformule wordt gegeven. De komende hoofdstukken zullen stap voor stap de concepten en wiskundige afleidingen bespreken die leiden tot deze resultaten.
2.1 Het Equivalentieprincipe
Door de invloed van massa’s te bestuderen, formuleerde Newton de zwaartekrachtswet: massa’s ondervinden een versnelling als gevolg van een aantrekkende kracht. Wanneer we zwaartekracht vergelijken met andere fundamentele krachten, zoals de elektrische en magnetische kracht, vallen zowel overeenkomsten als belangrijke verschillen op. We bekijken eerst hoe deze krachten ontstaan en welke versnellingen ze veroorzaken.
2.1.1 Elektrische kracht
De elektrische kracht ontstaat door ladingen op twee deeltjes \( q_{1} \) en \( q_{2} \). Afhankelijk van het teken van de ladingen trekken ze elkaar aan of stoten ze elkaar af. De kracht tussen de deeltjes wordt gegeven door de wet van Coulomb:
waarbij \( k_{e} \) de elektrische constante is en \( r \) de afstand tussen de ladingen. De versnelling die hieruit volgt hangt af van de massa van het betreffende deeltje:
Er is dus een aantrekkingskracht ten gevolge van de ladingen, maar de versnelling wordt bepaald door zowel de grootte van de massa's als de aantrekkingskracht.
2.1.2 Magnetische kracht
Magnetische krachten veroorzaken eveneens versnelling. Deze hangt af van de lading van het deeltje, de oriëntatie en sterkte van het magnetisch veld, en de massa van het deeltje.
2.1.3 Zwaartekracht
De zwaartekracht tussen twee massa’s \( m_{1} \) en \( m_{2} \) wordt volgens Newton gegeven door:
waarbij \( G \) de gravitatieconstante is. Op basis van analogie met de elektrische kracht zouden we een onderscheid kunnen verwachten tussen een gravitatiemassa \( m_{\text{grav}} \), die de kracht veroorzaakt, en een inertiële massa \( m_{\text{inert}} \), die de versnelling ondergaat. De vergelijking zou dan worden:
Op het eerste gezicht is er geen reden waarom \( m_{\text{inert},1} \equiv m_{\text{grav},1} \) zou gelden. Uit experimenten van onder meer Eötvös (ca. 1885) blijkt echter dat deze twee massa’s altijd gelijk zijn. Een ander belangrijk verschil met de elektrische kracht is dat er bij zwaartekracht geen positief of negatief bestaat: de kracht tussen twee massa’s is altijd aantrekkend.
Dankzij deze gelijkheid tussen gravitatie- en inertiemassa geldt:
De massa \( m \) van het vallende object valt weg, waardoor de versnelling uitsluitend afhangt van \( M \), de massa van het aantrekkende lichaam (bijvoorbeeld de Aarde). Dit betekent dat alle objecten, los van hun massa, met dezelfde versnelling vallen, mits luchtweerstand wordt verwaarloosd.
Dit leidt tot de conclusie dat de beweging van een object in een zwaartekrachtveld niet wordt bepaald door zijn eigen massa, maar door de eigenschappen van de ruimte waarin het zich beweegt.
2.1.4 Het gedachte-experiment van Einstein
Geïnspireerd door deze observatie, stelde Einstein zich twee situaties voor:
- Iemand staat stil op de Aarde en ervaart een zwaartekrachtsversnelling \( g = 9{,}81 \,\text{m/s}^{2} \).
- Iemand bevindt zich in een versnellende raket (met diezelfde versnelling \( g \)) in een lege ruimte.
Volgens Einstein zijn deze situaties lokaal niet van elkaar te onderscheiden, de persoon voelt in beide gevallen hetzelfde. Dit leidde tot het equivalentieprincipe: zwaartekracht en traagheid zijn lokaal equivalent. Einstein concludeerde dat daaruit volgt dat zwaartekracht niet een kracht is, maar een manifestatie van de kromming van de ruimte-tijd door massa.
2.1.5 Opmerking
Ook \( m \) oefent een kracht uit op \( M \), met de volgende versnelling:
Maar omdat meestal \( M \gg m \), is de versnelling van \( M \) verwaarloosbaar. De krachten zijn wel gelijk en tegengesteld (derde wet van Newton).
In de klassieke theorie oefenen alleen massa’s kracht op elkaar uit. Dat impliceert dat een massa geen invloed zou hebben op massaloze deeltjes zoals fotonen. De algemene relativiteitstheorie stelt echter dat massa’s de ruimte-tijd krommen, en dat alle objecten, zelfs massaloze, deze kromming volgen. Dus ook licht buigt af in een zwaartekrachtveld.
2.1.6 Bevestiging door observatie
In 1919 bevestigde Arthur Eddington dit effect experimenteel: tijdens een zonsverduistering merkte hij op dat sterren nabij de rand van de zon verschoven leken, precies zoals Einstein had voorspeld. De afleiding van dit effect volgt in een later experimenthoofdstuk.
2.1.7 Kerninzichten
- Zwaartekracht versus andere krachten: Terwijl krachten zoals de elektrische kracht afhankelijk zijn van zowel massa als lading, blijkt zwaartekracht uniek omdat alle objecten, ongeacht hun massa, dezelfde versnelling ondervinden in een zwaartekrachtveld.
- Gravitatie- en inertiemassa zijn gelijk: Uit experimenten blijkt dat de massa die een zwaartekracht veroorzaakt (gravitatiemassa) gelijk is aan de massa die reageert op een kracht (inertiemassa).
- Versnelling onafhankelijk van massa: Hierdoor vallen alle objecten met dezelfde versnelling, wat niet vanzelfsprekend is bij andere krachten.
- Gedachte-experiment van Einstein: Iemand in een lift op aarde ervaart hetzelfde als iemand in een versnellende raket in lege ruimte → lokale equivalentie tussen zwaartekracht en versnelling.
- Gevolg: Zwaartekracht wordt niet meer als kracht gezien, maar als een gevolg van de kromming van de ruimte-tijd.
2.1.8 Intuïtieve uitleg
Stel je voor dat je in een afgesloten ruimte zit, een raket, of een kamer zonder ramen. Als je voelt dat je tegen de vloer wordt gedrukt, kun je niet weten of je op Aarde bent (waar zwaartekracht je omlaag trekt) of in de ruimte in een raket die versnelt. Dit is de essentie van het equivalentieprincipe.
Einstein stelde dat, als je dat verschil niet kunt merken, er fysiek ook geen verschil is op dat moment en die plaats. Wat wij zwaartekracht noemen, is dan eigenlijk een effect van versnelling, of andersom: versnelling kan lokaal niet worden onderscheiden van zwaartekracht. In plaats van zwaartekracht als een kracht te zien (zoals Newton deed), beschrijft de algemene relativiteitstheorie zwaartekracht als een vervorming van de ruimte-tijd. Massa “vervormt” de ruimte-tijd, en objecten volgen de kromming daarvan.
2.2 Kromming van Ruimte-tijd
Om het belang van de overgang van het klassieke zwaartekrachtsmodel van Newton naar het geometrische model van Einstein te begrijpen, benaderen we het onderwerp eerst op een alternatieve, meer intuïtieve manier.
Stel een deeltje voor dat zich in de vrije ruimte bevindt, ver weg van massa’s en zonder invloed van externe krachten. In zo’n situatie blijft het deeltje zich voortbewegen met constante snelheid en in een rechte lijn, een principe dat al rond 1600 werd beschreven door Galileo Galilei.
Wanneer we de ruimte-tijd voorstellen als opgebouwd uit rechthoekige rasterlijnen, een ruimtelijk referentiekader zonder kromming, dan volgt het deeltje zijn pad als een rechte lijn langs dit raster. Er is niets dat het doet afwijken van zijn initiële richting of snelheid.
Einstein stelde echter dat dit beeld verandert zodra een grote massa aanwezig is. Die massa vervormt de structuur van de ruimte-tijd, waardoor de “rechte” lijnen van het raster gekromd raken. In plaats van dat de zwaartekracht als een kracht optreedt, beweegt het deeltje vanzelf langs deze gekromde lijnen.
Hoe dichter het deeltje bij de massa komt, hoe meer het pad afwijkt van zijn eerdere rechte lijn. Toch voelt het deeltje geen kracht: het beweegt vrij, maar volgt wel de kromming van de ruimte. Dit pad blijkt een soort “rechte lijn” binnen de kromming te zijn, en wordt later in dit document aangeduid als een geodetische lijn.
In de algemene relativiteitstheorie is er dus geen zwaartekrachtskracht zoals bij Newton, maar ontstaat het effect van zwaartekracht uit de geometrie van de ruimte-tijd zelf.
2.2.1 Van kracht naar geometrie
De uitdaging waar Einstein zich voor gesteld zag, was het vinden van een wiskundige beschrijving van deze kromming. Hij zocht een manier om de geometrie van de ruimte-tijd uit te drukken als functie van massa en energie, waarbij die beschrijving onafhankelijk zou zijn van het gekozen coördinatenstelsel.
Dit betekende dat hij een volledig coördinaat-onafhankelijke formulering zocht, zodat de natuurwetten in elk stelsel dezelfde vorm behouden, een centraal principe in de algemene relativiteitstheorie. De gevolgen van massa en energie op de geometrie zouden uiteindelijk worden vastgelegd in de zogenaamde Einstein-veldvergelijkingen. Deze vergelijkingen beschrijven hoe materie de ruimte-tijd kromt, en hoe die gekromde ruimte-tijd op zijn beurt bepaalt hoe materie zich beweegt.
2.2.2 Onafhankelijkheid van het Gekozen Coördinatenstelsel
Om de positie van een punt in de ruimte te bepalen, hebben we altijd een referentie nodig, een oorsprong waaruit we afstanden meten. Een gebruikelijke methode is het kiezen van een Cartesiaans coördinatenstelsel, met drie onderling loodrechte assen: de x-as, y-as en z-as.
We kunnen de locatie van een punt beschrijven met coördinaten \( (x, y, z) \), waarbij deze waarden de afstanden voorstellen tot de oorsprong langs respectievelijk de x-, y- en z-as. De afstand van dat punt tot de oorsprong is dan, volgens de stelling van Pythagoras:
Wanneer we een ander coördinatenstelsel kiezen (met een andere oorsprong of rotatie), veranderen de coördinaatwaarden en dus ook \( s \). Maar als we niet de absolute positie van één punt beschouwen, maar juist de kleine afstand tussen twee nabije punten, dan blijft die afstand invariant onder coördinatentransformaties. Deze differentiële afstand duiden we aan met:
Deze formule is toepasbaar in een orthogonaal, vlak, Cartesiaans stelsel. Om het algemener te maken, ook voor situaties waarin de assen niet noodzakelijk loodrecht staan, moeten we een meer fundamentele benadering gebruiken via vectoranalyse.
2.2.3 Vectorbenadering van afstand
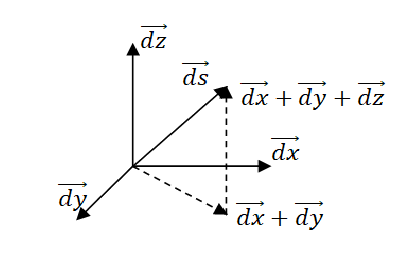
We kunnen de differentiële verplaatsing \( d\vec{s} \) opvatten als de som van drie vectorcomponenten:
Hierbij is \(\hat{e}_{x}\) de eenheidsvector langs de x-as, en geeft \(dx\) de grootte aan.
In Figuur 2.3 is schematisch weergegeven hoe de vector \(d\vec{s}\) kan worden opgesplitst in componenten langs de basisvectoren van het gekozen coördinatenstelsel.
De grootte \( ds \) van de vector \( d\vec{s} \) vinden we via het inwendig product \( d\vec{s} \cdot d\vec{s} \):
Ter herinnering: het inwendig product van twee vectoren \(\vec{A}\) en \(\vec{B}\) is:
waar \(\varphi\) de hoek is tussen de twee vectoren.
En dus:
Voor het volledige inwendig product van \(d\vec{s}\) krijgen we:
of compacter:
In een orthogonaal stelsel verdwijnen de kruisproducten zoals \( d\vec{x} \cdot d\vec{y} \), omdat de hoeken tussen de assen 90° zijn en \( \cos 90^\circ = 0 \). In dat geval krijgen we eenvoudig:
In een niet-orthogonaal coördinatenstelsel zijn de hoeken tussen de assen niet noodzakelijk 90°, waardoor ook de kruisproducten meetellen. De algemene vorm wordt dan:
De coëfficiënten \( g_{ij} \) geven informatie over de onderlinge oriëntatie van de assen, en vormen samen de metrische tensor \( g_{ij} \).
2.2.4 Uitbreiding naar Ruimte-tijd
Einstein wilde een nog algemenere formulering, voor een vierdimensionaal stelsel bestaande uit één tijd-as en drie ruimte-assen. Deze assen hoeven niet orthogonaal te zijn, en bovendien kan de metriek per punt in de ruimte-tijd verschillen. De algemene uitdrukking voor het kwadraat van de ruimte-tijd-interval luidt dan:
Of in Einstein-notatie:
waarin:
- \( \mu, \nu = 0, 1, 2, 3 \),
- \( x^{0} = ct, \; x^{1} = x, \; x^{2} = y, \; x^{3} = z \),
- \( g_{\mu\nu} \) de componenten zijn van de vierdimensionale metrische tensor.
In de Einstein-notatie (waar automatisch wordt gesommeerd over herhaalde indices, ook wel “dummy-indices” genoemd), wordt de som niet expliciet uitgeschreven.
2.2.4.1 Uitwerking van de som
Wanneer we vergelijking (\ref{eq:R2242}) volledig uitschrijven voor alle waarden van \(\mu\) en \(\nu\), krijgen we:
\begin{align} ds^{2} =\;& g_{00}\,dx^{0}dx^{0} + g_{01}\,dx^{0}dx^{1} + g_{02}\,dx^{0}dx^{2} + g_{03}\,dx^{0}dx^{3} \\ \notag &+ g_{10}\,dx^{1}dx^{0} + g_{11}\,dx^{1}dx^{1} + g_{12}\,dx^{1}dx^{2} + g_{13}\,dx^{1}dx^{3} \\ \notag &+ g_{20}\,dx^{2}dx^{0} + g_{21}\,dx^{2}dx^{1} + g_{22}\,dx^{2}dx^{2} + g_{23}\,dx^{2}dx^{3} \\ \notag &+ g_{30}\,dx^{3}dx^{0} + g_{31}\,dx^{3}dx^{1} + g_{32}\,dx^{3}dx^{2} + g_{33}\,dx^{3}dx^{3} \end{align}
Dit is de vierdimensionale tegenhanger van vergelijking (\ref{eq:R2232}), die we eerder voor een driedimensionale ruimte opstelden. (Voor meer gedetailleerde informatie zie hoofdstuk 5.)
2.2.4.2 Opmerking over symmetrie
De metrische tensor \(g_{\mu\nu}\) is symmetrisch, wat betekent dat:
Daarom bevat de tensor slechts 10 onafhankelijke componenten in plaats van 16. Dit maakt de tensor wiskundig elegant en praktisch hanteerbaar.
2.2.5 Kerninzichten
- Vrije beweging in vlakke ruimte: Een deeltje zonder invloed van krachten beweegt in een rechte lijn met constante snelheid (inertiebeweging).
- Ruimte-tijd als geometrie: In Einsteins visie vervormt massa de structuur van ruimte-tijd, waardoor ‘rechte lijnen’ (inertiebanen) gebogen worden.
- Zwaartekracht = kromming: In plaats van een kracht (zoals bij Newton), is zwaartekracht in de relativiteitstheorie het gevolg van de kromming van ruimte-tijd.
- Geodeten: Objecten volgen in deze gekromde ruimte de kortste of ‘rechtste’ banen, ook al lijken die voor een externe waarnemer gebogen.
- Einsteins uitdaging: Ontwikkel een coördinaten-onafhankelijke wiskundige beschrijving van hoe massa ruimte-tijd vervormt → Einstein-veldvergelijkingen.
Voor een verdere verdieping in tensoren, metriek en hun toepassing op specifieke gevallen zoals de Schwarzschild-oplossing, verwijzen we naar hoofdstuk 5)
2.2.6 Intuïtieve uitleg
Stel je voor:
- Een biljartbal rolt over een gladde, vlakke tafel, het beweegt in een rechte lijn.
- Leg je nu een zware bol op een rekbare rubberen mat (zoals een trampoline), dan ontstaat er een kromming.
- Als je nu een kleinere bal op de mat laat rollen, zal die bal afgebogen worden door de vervorming, ook al duwt niemand erop.
Volgens Newton is zwaartekracht een kracht op afstand. Volgens Einstein is er geen kracht: objecten bewegen in rechte lijnen, maar die rechte lijnen liggen op een gekromd oppervlak. In deze zin wordt een vallende appel niet aangetrokken, maar volgt hij simpelweg de kortste route door een vervormde ruimte-tijd.
2.3 Covariante en Contravariante Vectoren en Duale Vectoren
In de algemene relativiteitstheorie komen de begrippen contravariant en covariant regelmatig voor. In deze sectie lichten we deze concepten toe en laten we zien hoe ze ontstaan uit de manier waarop vectoren en velden transformeren onder een verandering van coördinatenstelsel.
Zoals eerder besproken, moeten fysische grootheden, zoals vectoren, tensoren en velden, onafhankelijk zijn van het gekozen coördinatenstelsel. Bij een overgang naar een ander stelsel (bijvoorbeeld via rotatie of translatie) blijven de fysische eigenschappen behouden, maar de componenten ervan veranderen op een specifieke manier: ze transformeren volgens welbepaalde regels, afhankelijk van het type object (covariant of contravariant).
2.3.1 Scalaire grootheden, vectoren en velden
Een scalaire grootheid, zoals temperatuur, heeft op elke locatie een waarde maar geen richting. Een verzameling van scalars over de ruimte vormt een scalair veld.
Wanneer zo'n veld een richtingsafhankelijke verandering vertoont (bijvoorbeeld een temperatuurstijging in een bepaalde richting), kunnen we daarvan de afgeleide nemen. Deze afgeleide gedraagt zich als een vector, en in dit specifieke geval spreken we van een duale vector.
Een duale vector is afhankelijk van het gekozen coördinatenstelsel: bij een transformatie veranderen de componenten van de vector zó dat het geheel fysisch consistent blijft. Omdat deze componenten mee transformeren met het coördinatenstelsel, worden ze covariant genoemd.
Een “gewone” vector (zoals snelheid of versnelling) reageert juist anders: wanneer het coördinatenstelsel verandert, blijven de onderliggende vectoren fysiek hetzelfde, maar de componenten ervan veranderen in tegengestelde richting ten opzichte van de basisvectoren. Zulke vectoren worden contravariant genoemd.
2.3.1.1 Notatie en definities
Om onderscheid te maken tussen beide soorten vectoren, wordt conventioneel de volgende notatie gebruikt:
- Een contravariante vector heeft een bovenindex: \( A^{\mu} \).
- Een covariante vector heeft een onderindex: \( A_{\mu} \).
Deze zijn aan elkaar verbonden via de metrische tensor \( g_{\mu\nu} \) volgens de relatie:
De contractie van een contravariante vector met zijn covariante tegenhanger levert een scalaire invariant op:
Deze uitdrukking betekent dat het inwendig product van een vector met zijn duale (of ‘verlaagde’) versie resulteert in een grootheid \( I \) die invariant blijft onder coördinatentransformaties. Dit getal \( I \) kan geïnterpreteerd worden als de norm of het kwadraat van de afstand in ruimte-tijd, afhankelijk van het teken:
- Tijdachtig: \( I > 0 \)
- Ruimteachtig: \( I < 0 \)
- Lichtachtig: \( I = 0 \)
Deze classificatie maakt duidelijk hoe de metrische tensor een sleutelrol speelt: zij bepaalt niet alleen hoe componenten van vectoren worden omgezet, maar ook hoe afstanden, lengtes en causale structuren in gekromde ruimte-tijd gedefinieerd zijn. Hierbij wordt de signatuurconventie (+,−,−,−) gehanteerd, waarbij de tijdcomponent positief bijdraagt en de ruimtecomponenten negatief.
2.3.2 Transformaties tussen coördinatenstelsels
Stel dat we werken in een coördinatenstelsel met coördinaten \( x^{m} \) (waarbij \( m = 0,1,2,3 \)), en dat we overgaan naar een nieuw coördinatenstelsel met coördinaten \( y^{n} \). De relatie tussen de twee stelsels wordt dan gegeven door:
In de Einstein-notatie, waarin automatisch wordt gesommeerd over herhaalde indices (van 0 tot 3), wordt dit:
2.3.2.1 Voorbeeld: afgeleide van een scalaire functie
Beschouw een scalaire functie \( \varphi \). De differentiaal is:
Volledig uitgeschreven:
In het nieuwe coördinatenstelsel \( y^{n} \) gebruiken we de kettingregel om de componenten van de afgeleide te transformeren:
Hieruit volgt dat de componenten transformeren als:
waarbij:
- \( A_{n}(y) = \dfrac{d\varphi}{dy^{n}} \): de covariante vector in het \(y\)-stelsel,
- \( B_{m}(x) = \dfrac{\partial \varphi}{\partial x^{m}} \): de covariante vector in het \(x\)-stelsel.
Dit is een covariante transformatie.
2.3.2.1.1 Volledig uitgeschreven (matrixvorm)
In matrixvorm wordt vergelijking (\ref{eq:R23215}):
2.3.2.2 Contravariante transformatie
Voor contravariante vectoren is de transformatieformule juist omgekeerd:
Volledig uitgeschreven in matrixvorm:
2.3.3 Transformatiegedrag van basisvectoren
In de tensorrekening is het belangrijk om niet alleen te begrijpen hoe de componenten van een vector veranderen bij coördinatentransformatie, maar ook hoe de bijbehorende basisvectoren zelf transformeren.
Bij een verandering van coördinatenstelsel van \( x^{m} \) naar \( y^{n} \) zijn de bijbehorende basisvectoren respectievelijk:
- \( \vec e_{m} = \dfrac{\partial}{\partial x^{m}} \)
- \( \vec f_{n} = \dfrac{\partial}{\partial y^{n}} \)
De relatie tussen basisvectoren in verschillende coördinaten volgt uit de kettingregel van de differentiaalrekening:
Hieruit volgt dat de basisvectoren covariant transformeren: ze veranderen mee met het coördinatensysteem. De componenten van contravariante vectoren moeten zich dus aanpassen in tegengestelde richting om het geheel fysisch invariant te houden.
2.3.3.1 Opmerking over Einstein-notatie
De Einstein-notatie maakt gebruik van herhaalde indices (zogeheten dummy-indices), waarbij automatisch gesommeerd wordt over de waarden 0 tot en met 3:
In deze sectie zijn veel vergelijkingen bewust expliciet uitgeschreven om de betekenis van deze notatie te verduidelijken. In latere hoofdstukken zullen we vaker de ingekorte Einstein-notatie gebruiken voor compactheid.
2.3.4 Kernpunten
- Scalars versus vectoren:
- Een scalaire grootheid (zoals temperatuur) verandert niet onder een coördinatentransformatie.
- Een vector heeft zowel richting als grootte. De componenten van een vector veranderen wél onder transformatie, afhankelijk van de vectorsoort.
- Contravariante vectoren (zoals positie- of snelheidsvectoren \( W^{n} \)):
- Transformeren tegengesteld aan de basisvectoren om de vector fysisch constant te houden.
- Transformatieformule:
\begin{align} W^{n}(y) = \frac{dy^{n}}{dx^{m}} B^{m}(x) \end{align}
- Covariante vectoren (zoals duale vectoren \( A_{n} \)):
- Transformeren mee met het coördinatenstelsel.
- Transformatieformule:
\begin{align} A_{n}(y) = \frac{dx^{m}}{dy^{n}} B_{m}(x) \end{align}
- Dualiteit:
- Covariante vectoren zijn wiskundig gezien lineaire functies op vectoren; zij behoren tot de duale vectorruimte.
- Omzetten tussen covariant en contravariant:
- Met behulp van de metrische tensor \( g_{\mu\nu} \) kunnen we contravariante en covariante vectoren in elkaar omzetten:
\begin{align} A_{\mu} = g_{\mu\nu} A^{\nu}, \quad A^{\mu} = g^{\mu\nu} A_{\nu} \end{align}
- Met behulp van de metrische tensor \( g_{\mu\nu} \) kunnen we contravariante en covariante vectoren in elkaar omzetten:
2.3.5 Intuïtieve uitleg
Stel je voor dat je op een heuvel staat en in verschillende richtingen de helling meet. De heuvel zelf verandert niet als je je assen draait, maar de getallen waarmee je de helling beschrijft wel. Dit is precies de essentie van tensortransformaties: de richting van een vector blijft fysisch gelijk, maar de coördinaten waarin je die vector uitdrukt veranderen met het stelsel.
De metriek fungeert als een soort converter tussen beide soorten vectoren. Je kunt de metriek zien als een liniaal die in elke richting anders meet, afhankelijk van de lokale kromming van de ruimte-tijd.
Vergelijkingstabel
| Eigenschap | Contravariant | Covariant |
|---|---|---|
| Indexpositie | Boven \( A^{\mu} \) | Onder \( A_{\mu} \) |
| Transformeert… | Tegengesteld aan basis | Mee met basis |
| Voorbeeld | Positie, snelheid | Gradiënt, differentiaal |
| Oorsprong | Richting in ruimte | Richtingsafgeleide van een scalair veld |
2.4 Covariante en Contravariante Transformaties van Tensoren
In de algemene relativiteitstheorie, en breder in de tensoranalyse, spelen covariante, contravariante en gemengde tensoren een centrale rol. De manier waarop deze tensoren transformeren onder een verandering van coördinatenstelsel is essentieel om natuurkundige wetten coördinatenonafhankelijk te formuleren. In deze sectie bespreken we de transformatie-eigenschappen van de verschillende soorten tensoren.
De transformatieregels die hier worden behandeld vormen een directe uitbreiding van de regels voor vectoren uit de vorige sectie.
2.4.1 Covariante Tensoren
Een covariante tensor heeft één of meer onderindices, zoals \( T_{mn} \), en kan worden opgebouwd uit het product van covariante vectoren \( A_{m} \) en \( B_{n} \).
De transformatie van een covariante tensor van een coördinatenstelsel \(x\) naar een nieuw stelsel \(y\) verloopt als volgt:
Het resultaat van de transformatie van \( T_{rs} \) naar \( T_{mn} \) wordt dan gegeven door:
Hierbij geldt:
- \( T_{mn}(y) \): de covariante tensor in het nieuwe coördinatenstelsel \(y\),
- \( \dfrac{dx^{r}}{dy^{m}} \) en \( \dfrac{dx^{s}}{dy^{n}} \): de Jacobiaancomponenten van de transformatie van \(y\) naar \(x\),
- \( T_{rs}(x) \): de oorspronkelijke covariante tensor in het oude stelsel.
2.4.2 Contravariante Tensoren
Een contravariante tensor heeft één of meer bovenindices, zoals \( T^{mn} \), en kan worden opgebouwd uit contravariante vectoren \( A^{m} \) en \( B^{n} \).
De transformatie is tegengesteld aan die van de covariante tensor:
Het resultaat van de transformatie van \( T^{rs} \) naar \( T^{mn} \) wordt dan gegeven door:
Deze formule geeft aan hoe de componenten van een contravariante tensor zich aanpassen bij een verandering van basis.
2.4.3 Gemengde Tensoren
Een gemengde tensor bevat zowel boven- als onderindices, bijvoorbeeld \( T^{m}{}_{n} \). Zo’n tensor kan bijvoorbeeld ontstaan uit het product van een contravariante vector \( A^{m} \) en een covariante vector \( B_{n} \).
De bijbehorende transformatieformule luidt:
Dus, de transformatie van een gemengde tensor is:
Deze mix van afgeleiden weerspiegelt het gecombineerde gedrag van de verschillende indexsoorten.
2.4.4 Kernpunten en Intuïtie
- Een tensor wordt gekenmerkt door zijn rang (aantal indices) en het type indices (boven of onder).
- Tensoren zijn de natuurlijke taal voor het formuleren van fysische wetten die onafhankelijk zijn van het gekozen coördinatenstelsel.
- De transformatie-eigenschappen van een tensor garanderen dat deze onder coördinatenverandering zijn betekenis behoudt.
Rang en Notatie
- Een tensor van rang 0 is een scalaire grootheid, zoals temperatuur of massa. Deze verandert niet onder coördinatentransformaties.
- Een vector is een tensor van rang 1, en kan voorkomen in twee vormen:
- Contravariant: genoteerd met een bovenindex, bijvoorbeeld \( V^{m} \).
- Covariant: genoteerd met een onderindex, bijvoorbeeld \( V_{m} \).
- Een tensor van rang 2 kent meerdere vormen:
- Volledig covariant: \( T_{\mu\nu} \),
- Volledig contravariant: \( T^{\mu\nu} \),
- Gemengd: \( T^{\mu}{}_{\nu} \), enz.
Transformatie-eigenschappen
Een tensor is gedefinieerd door de manier waarop zijn componenten transformeren onder een verandering van coördinatenstelsel. Deze transformatieregels zorgen ervoor dat de tensoren hun fysische betekenis behouden, ongeacht het gekozen stelsel:
- Covariante componenten (onderindices, bijv. \( T_{\mu\nu} \)) transformeren met de afgeleide van de oude naar de nieuwe coördinaten.
- Contravariante componenten (bovenindices, bijv. \( T^{\mu\nu} \)) transformeren met de afgeleide van de nieuwe naar de oude coördinaten.
- Gemengde tensoren combineren beide regels (bijv. \( T^{\nu}{}_{\mu} \)), afhankelijk van de plaats van de indices.
Een belangrijk voorbeeld is de metrische tensor \( g_{\mu\nu} \), waarmee we indices omhoog of omlaag kunnen brengen via:
Deze mogelijkheid tot indexmanipulatie maakt het eenvoudig om tussen covariante en contravariante beschrijvingen te wisselen.
Fysische Relevantie
De fundamentele vergelijkingen van de natuurkunde, zoals de Einstein-veldvergelijkingen in de algemene relativiteitstheorie, zijn geformuleerd in termen van tensoren. Hierdoor zijn zij invariant onder coördinatentransformaties, wat een essentieel kenmerk is van elke covariante theorie. Dit garandeert dat natuurkundige wetten dezelfde vorm behouden, ongeacht het gekozen coördinatenstelsel, en dat de onderliggende geometrie consistent beschreven blijft.
Intuïtief beeld
Je kunt tensortransformaties vergelijken met het opnieuw intekenen van een kaart:
- Stel je een hoogtekaart voor met heuvels, dalen en windrichtingen.
- Je draait de kaart 30°, maar de heuvels blijven waar ze zijn, alleen de coördinaten waarin je ze beschrijft veranderen.
Tensoren gedragen zich als meetbare structuren in die wereld:
- Een vectorpijl op de kaart (bijv. windrichting) krijgt nieuwe coördinaten na de draai, zodat de richting fysiek hetzelfde blijft.
- Een gradiënt (bijv. de helling van het landschap) wijst nog steeds omhoog, maar je beschrijft die nu met andere componenten, afhankelijk van de nieuwe assen.
Zo gedragen tensoren zich onder transformaties: hun geometrische of fysische betekenis blijft gelijk, maar de componenten veranderen afhankelijk van het gekozen coördinatenstelsel.
Overzicht van transformaties
| Tensorsoort | Indexnotatie | Transformeert als… |
|---|---|---|
| Scalar | \( \phi \) | Blijft gelijk |
| Contravariante vector | \( V^{\mu} \) | \( \dfrac{\partial y^{\mu}}{\partial x^{\nu}} V^{\nu} \) |
| Covariante vector | \( V_{\mu} \) | \( \dfrac{\partial x^{\nu}}{\partial y^{\mu}} V_{\nu} \) |
| Covariante tensor | \( T_{\mu\nu} \) | Twee keer de covariante regel |
| Contravariante tensor | \( T^{\mu\nu} \) | Twee keer de contravariante regel |
| Gemengde tensor | \( T^{\mu}{}_{\nu} \) | Mix van beide |
2.5 Christoffel-symbool en de Covariante Afgeleide
Om zwaartekracht als een geometrisch fenomeen te beschrijven, moest Einstein een manier vinden om de kromming van de ruimte-tijd wiskundig vast te leggen. In plaats van krachten introduceert de algemene relativiteit een structuur op de ruimte-tijd zelf, waarin het Christoffel-symbool een centrale rol speelt. Dit symbool beschrijft hoe basisvectoren veranderen en ligt aan de basis van de covariante afgeleide, die nodig is om op consistente wijze te differentiëren in gekromde ruimte.
2.5.1 Basisdefinitie van het Christoffel-symbool
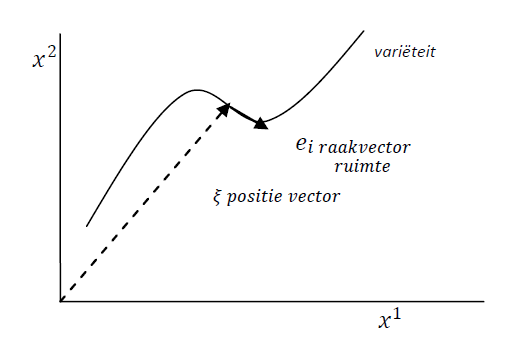
Beschouw een coördinatenstelsel \( x^{i} \) met een bijbehorende positievector \( \boldsymbol{\xi}(x^{i}) \), uitgesproken als “ksi”, die een ruimtelijke variëteit representeert. We definiëren de basisvectoren in de raakruimte als de partiële afgeleiden van \( \boldsymbol{\xi} \):
De afgeleide van deze basisvector ten opzichte van een andere coördinaat \( x^{j} \) geeft aan hoe de richting van de basisvector verandert in de ruimte:
Deze tweede afgeleide kan worden uitgedrukt als een lineaire combinatie van de basisvectoren zelf:
Hierin is \( \Gamma^{k}{}_{ij} \) het Christoffel-symbool van de tweede soort. Dit object beschrijft hoe de basisvectoren veranderen, en daarmee de kromming van de ruimte. Als deze afgeleide nul is, verandert de richting van de basisvector niet en is de ruimte vlak.
2.5.1.1 Vectoriële interpretatie van richtingsverandering
De basisvectoren \( e_{i} \) behoren tot de raakruimte aan een punt van de variëteit. De afgeleide uit vergelijking (\ref{eq:R251}) vertelt ons hoe deze basis verandert in de richting van \( x^{j} \). Als \( \partial e_{i} / \partial x^{j} \neq 0 \), is de ruimte gekromd.
Volledig uitgeschreven heeft vergelijking (\ref{eq:R251}) de vorm
Vanaf hier laten we het vectorteken voor \( e_{i} \) weg voor de leesbaarheid.
2.5.1.2 Afleiding van het Christoffel-symbool
Gebruikmakend van de dualiteit van basisvectoren nemen we het inwendig product met de duale basisvector \( e^{k} \):
Door beide zijden van vergelijking (\ref{eq:R251}) met \( e^{k} \) te vermenigvuldigen, verkrijgen we
Dit geeft een directe definitie van het Christoffel-symbool.
2.5.1.3 Symmetrie van de onderste indices
Omdat in een gladde variëteit de volgorde van differentiëren niet uitmaakt (\( \partial_{i}\partial_{j} = \partial_{j}\partial_{i} \)), geldt
Het Christoffel-symbool is dus symmetrisch in de onderste indices: \( \Gamma^{k}{}_{ij} = \Gamma^{k}{}_{ji} \).
2.5.1.4 Afleiding via de coördinatentransformatie
Beschouw opnieuw
Substitutie in (\ref{eq:R251}) levert
Deze uitdrukking laat zien dat het Christoffel-symbool is opgebouwd uit tweede afgeleiden van de coördinaten, en dus rechtstreeks verband houdt met de geometrie van de ruimte-tijd.
2.5.1.5 Koppeling aan de metrische tensor
De metrische tensor \( g_{ik} \) wordt gedefinieerd als het inwendig product van de basisvectoren:
Met behulp van de inverse metriek \( g^{ik} \) kunnen we basisvectoren onderling omzetten:
2.5.1.6 Samenvatting
- Het Christoffel-symbool \(\Gamma^{k}{}_{ij}\) beschrijft hoe basisvectoren veranderen in een gekromde ruimte.
- Het speelt een centrale rol in de definitie van de covariante afgeleide, die in het volgende hoofdstuk wordt besproken.
- De symmetrie \(\Gamma^{k}{}_{ij} = \Gamma^{k}{}_{ji}\) volgt uit de commutativiteit van partiële afgeleiden.
- Het Christoffel-symbool is zowel uitdrukbaar via coördinaatafgeleiden als via de metrische tensor, en is daarmee fundamenteel verbonden aan de structuur van ruimte-tijd.
2.5.2 Covariante Afgeleide
De covariante afgeleide is een uitbreiding van het concept van de gewone afgeleide in vlakke ruimte. In de algemene relativiteitstheorie moet deze afgeleide worden aangepast zodat ze geldig is in gekromde ruimte-tijd. Einstein eiste dat zijn theorie covariant moest zijn: fysische wetten moeten dezelfde vorm behouden in elk coördinatenstelsel.
Om dit te garanderen, definiëren we de covariante afgeleide \( \nabla \), die de gewone afgeleide corrigeert met extra termen. Deze afgeleide voldoet aan
wat de unieke torsievrije, metrisch compatibele verbinding (Levi-Civita-verbinding) definieert.
2.5.2.1 Metriek en afgeleiden
We beginnen met de metrische tensor (\ref{eq:R57})
Neem de gewone afgeleide naar \( x^s \):
Door de eerder afgeleide symmetrie (zie vergelijking (\ref{eq:R51}), kunnen we schrijven:
Brengen we deze termen over naar een kant van de vergelijking, dan krijgen we:
2.5.2.2 Definitie van de covariante afgeleide
Deze relatie motiveert de definitie van de covariante afgeleide van de metriek:
We drukken de raakruimte-afgeleiden nu uit in termen van Christoffel-symbolen. Uit het vorige hoofdstuk weten we:
Daarmee wordt vergelijking (\ref{eq:R61}):
Hier krijgen we de covariante afgeleide van de metrische tensor, uitgedrukt in de normale afgeleide, gecorrigeerd met twee termen die producten zijn van de metrische tensor en het bijbehorende Christoffel-symbool:
2.5.2.3 Cyclische permutatie
Door dezelfde logica toe te passen op permutaties van de indices, krijgen we:
Nu voeren we de volgende operatie uit: (\ref{eq:R66})+(\ref{eq:R65})-(\ref{eq:R64}), waarbij we rekening houden met de symmetrie zoals genoemd in vergelijking (\ref{eq:R51}), dat \(\Gamma^i{}_{jk} = \Gamma^i{}_{kj}\), met als resultaat:
2.5.2.4 Christoffel-symbool via metriek
We isoleren \(\Gamma^t{}_{nm}\) door met de inverse metriek \(g^{st}\) te vermenigvuldigen:
Deze uitdrukking geeft de Christoffel-symbolen als functie van de metrische tensor en zijn eerste afgeleiden.
2.5.2.5 Opmerkingen
2.5.2.5.1 Covariantie van de metriek
We bevestigen dat de covariante afgeleide van de metriek inderdaad nul is (zie vergelijking (\ref{eq:R58})):
Gebruikmakend van: \(A_\mu = g_{\mu\nu} A^\nu\) en de Leibniz-regel (kettingregel):
Zowel (73) als (74) moeten hetzelfde resultaat geven, dus:
Dan moet: \(A^\nu \nabla_\rho g_{\mu\nu} = 0\). Aangezien \(A^\nu \neq 0\) dan is \(\nabla_\rho g_{\mu\nu} = 0\).
Hieruit volgt dat de covariante afgeleide van de metriek nul is, wat een fundamentele eigenschap is van de Levi-Civita-verbinding.
2.5.2.5.2 Transformatieregel van vectorcomponenten
Beschouw een vector: \(\mathbf{V} = V^m \mathbf{e}_m\).
De component in de richting van de n-as is:
Zoals we weten: \(g_{mn} = \mathbf{e}_m \cdot \mathbf{e}_n = g_{nm}\). Dus:
Omgekeerd, via de inverse metriek: \(g_{nm} = \frac{1}{g^{mn}}\),
2.5.2.6 Covariante Afgeleide voor een Contravariante Vector
We willen nu de covariante afgeleide berekenen van een contravariant vectorveld \(V^m\). In vlakke ruimte zou dit eenvoudigweg de gewone partiële afgeleide zijn. In een gekromde ruimte-tijd moeten we echter rekening houden met het feit dat de basisvectoren zelf ook kunnen variëren van punt tot punt.
2.5.2.6.1 Uitgangspunt: vector in componentvorm
We beschouwen de vector \(\mathbf{V}\) als een lineaire combinatie van basisvectoren \(\mathbf{e}_m\):
De afgeleide van \(\mathbf{V}\) naar een coördinaat \(x^l\) is:
2.5.2.6.2 Koppeling met het Christoffel-symbool
Uit eerder werk (vergelijking (\ref{eq:R251})) weten we dat de afgeleide van de basisvector wordt uitgedrukt via het Christoffel-symbool:
Substitutie in vergelijking (\ref{eq:R77})) levert:
De som over de indices m en k maakt gebruik van de Einstein-notatie. We mogen de dummy-indices hernoemen (zie opmerking onderaan), en herschrijven de tweede term door m → γ en k → m:
2.5.2.6.3 Definitie van de covariante afgeleide
Hieruit volgt direct de definitie van de covariante afgeleide van de contravariante vector \(V^m\):
De extra term (met het Christoffel-symbool) corrigeert voor het feit dat de basisvectoren in een gekromde ruimte zelf veranderen. De covariante afgeleide \(\nabla_l V^m\) is daardoor tensorieel van aard en transformeert correct onder coördinatenwisselingen.
2.5.2.6.4 Opmerking: dummy-indices
In de Einstein-notatie mogen we vrij kiezen hoe de dummy-index te benoemen, zolang deze index in het product wordt gesommeerd. Bijvoorbeeld:
Of we de index nu \(\mu\), \(\gamma\) of \(k\) noemen, maakt niets uit voor het eindresultaat. De index fungeert slechts als plaatsvervanger voor de sommatie over de dimensies.
2.5.2.6.5 Samengevat
- De covariante afgeleide van een contravariante vector \(V^m\) is:
\begin{align} \nabla_l V^m = \frac{\partial V^m}{\partial x^l} + \Gamma^m{}_{l\gamma} V^\gamma \end{align}
- Deze formule corrigeert de gewone afgeleide met een term die de kromming van de ruimte-tijd weerspiegelt via het Christoffel-symbool.
- Het resultaat is een tensor van dezelfde rang als de originele vector.
2.5.2.7 Covariante Afgeleide voor een Covariante Vector
We bekijken nu hoe de covariante afgeleide werkt voor een covariante vector \(B_\mu\). We maken hierbij gebruik van het scalaire product van een contravariante vector \(A^\mu\) en een covariante vector \(B_\mu\), en passen vervolgens de afgeleideregels toe.
2.5.2.7.1 Beginpunt: productregel op scalaire grootheid
Neem het scalaire product \(A^\mu B_\mu\). De covariante afgeleide van dit product is
Substitueer de uitdrukking voor \(\nabla_\alpha A^\mu\) uit eerder werk:
Daarmee wordt vergelijking (\ref{eq:R85}):
2.5.2.7.2 Eigenschap van scalars
Omdat het scalaire product \(A^\mu B_\mu\) een scalar is, is de covariante afgeleide gelijk aan de gewone afgeleide:
2.5.2.7.3 Vergelijking van beide uitdrukkingen
Door vergelijking van de rechterkanten van (\ref{eq:R87}) en (\ref{eq:R88}):
Nu herschrijven we de indices in de tweede termen aan beide kanten om de vergelijking op te schonen. Hernoem \(\mu \to \sigma\) en \(\nu \to \mu\) in de laatste term aan de rechterkant. Dan blijft over:
Omdat deze vergelijking voor elk \(A^\mu\) moet gelden, volgt:
2.5.2.7.4 Definitie
Dit is de covariante afgeleide van een covariante vector \(B_\mu\). De formule is analoog aan die van contravariante vectoren, maar het Christoffel-symbool komt nu met een minteken en met verwisselde indexpositie:
- Voor \(V^m\): \(\nabla_l V^m = \frac{\partial V^m}{\partial x^l} + \Gamma^m{}_{l\gamma} V^\gamma\)
- Voor \(B_\mu\): \(\nabla_\alpha B_\mu = \frac{\partial B_\mu}{\partial x^\alpha} - \Gamma^\sigma{}_{\alpha\mu} B_\sigma\)
2.5.2.7.5 Samengevat
- De covariante afgeleide van een covariante vector \(B_\mu\) is:
\begin{align} \nabla_\alpha B_\mu = \frac{\partial B_\mu}{\partial x^\alpha} - \Gamma^\sigma{}_{\alpha\mu} B_\sigma \end{align}
- De tweede term corrigeert voor de verandering van de basisvectoren in een gekromde ruimte.
- Deze definitie zorgt ervoor dat de afgeleide transformeert als een tensor.
2.5.3 Relatie met Tensor
In dit hoofdstuk onderzoeken we hoe een tensor, opgebouwd uit de afgeleide van een covariante vector \(V_m\), zich gedraagt onder een coördinatentransformatie. We laten zien dat de gewone afgeleide van een vector géén tensor oplevert, en dat de covariante afgeleide noodzakelijk is om een tensoriële relatie te behouden.
2.5.3.1 Transformatie van een afgeleide
Beschouw de volgende definitie van een tensor van rang 2 in het x-coördinatenstelsel:
In een ander coördinatenstelsel y, schrijven we:
We onderzoeken nu of \(T_{mn} (x)\) zich daadwerkelijk als een tensor gedraagt, d.w.z. of vergelijking (\ref{eq:R97}) overeenkomt met de getransformeerde vorm van (\ref{eq:R96}).
2.5.3.2 Verwachte tensortransformatie
De gebruikelijke transformatieformule voor een covariante tensor luidt:
Substitueer nu \(T_{rs}(x) = \frac{\partial V_r (x)}{\partial x^s}\):
Merk op dat: \(\frac{\partial V_r (x)}{\partial x^s} = \frac{\partial V_r (x)}{\partial y^n} \cdot \frac{\partial y^n}{\partial x^s}\) via de kettingregel.
Maar de vergelijking vereenvoudigt door direct te beschouwen:
We willen nu aantonen dat: \(\frac{\partial V_m (y)}{\partial y^n} \neq T_{mn} (y)\).
2.5.3.3 Berekening van \(\frac{\partial V_m (y)}{\partial y^n}\)
Gebruik de transformatie van vectorcomponenten: \(V_m (y) = \frac{\partial x^r}{\partial y^m} V_r (x)\).
Dan is:
Pas de productregel toe:
Gebruik vervolgens de inverse transformatie:
Ingevuld in (\ref{eq:R99}):
2.5.3.4 Koppeling met Christoffel-Symbolen
Herinner dat (zie eerdere afleiding van Christoffel-symbool):
Substitutie in (\ref{eq:R101}) geeft:
Herordenen geeft:
Dus: \(T_{mn} (y) \neq \frac{\partial V_m (y)}{\partial y^n}\).
2.5.3.5 Covariante afgeleide van \(V_m\)
Volgens bovenstaande resultaat:
En dat is exact de covariante afgeleide van de covariante vector \(V_m\) (zie 2.5.2.7.4):
2.5.3.6 Conclusie
- De gewone afgeleide \(\frac{\partial V_m^x}{\partial x^n}\) is géén tensor.
- Pas na correctie met het Christoffel-symbool ontstaat een grootheid die zich onder coördinatentransformaties gedraagt als tensor.
- De correcte tensoriële versie is de covariante afgeleide: \(T_{mn} = \nabla_n V_m\).
2.5.3.7 Covariante Differentiatie voor een Covariante Tensor
2.5.3.7.1 Uitgangspunt
Beschouw een tensor \(T_{\mu\nu}\), opgebouwd als het product van twee covariante vectoren \(A_\mu\) en \(B_\nu\):
We willen nu de covariante afgeleide nemen van deze tensor met betrekking tot \(x^\alpha\):
Volgens de productregel:
Gebruik nu de definitie van de covariante afgeleide van een covariante vector (zie hoofdstuk 2.5.2.7):
Substitueer deze in (112):
Werk dit verder uit:
2.5.3.7.2 Definitieve formule
Omdat \(T_{\mu\nu} = A_\mu B_\nu\), krijgen we uiteindelijk:
2.5.3.7.3 Samenvatting
De covariante afgeleide van een covariante tensor \(T_{\mu\nu}\) bestaat uit:
- de gewone afgeleide \(\frac{\partial T_{\mu\nu}}{\partial x^\alpha}\),
- en twee correctietermen met Christoffel-symbolen, één voor elke index van de tensor.
Dit garandeert dat \(\nabla_\alpha T_{\mu\nu}\) zich als een tensor gedraagt onder coördinatentransformaties.
2.5.3.8 Covariante Differentiatie voor een Contravariante Tensor
We breiden nu het concept van covariante differentiatie verder uit naar een contravariante tensor van rang 2. Deze tensor heeft twee bovenindices en transformeert anders dan een covariante tensor. We volgen opnieuw de productregel en passen de bekende covariante afgeleideformules toe.
2.5.3.8.1 Uitgangspunt
Beschouw een contravariante tensor \(T^{\mu\nu}\) als het product van twee contravariante vectoren:
De covariante afgeleide van \(T^{\mu\nu}\) met betrekking tot \(x^\alpha\) is dan:
Gebruik nu de formule voor de covariante afgeleide van een contravariante vector (zie hoofdstuk 2.5.2.6.3)):
Substitutie in (112) geeft:
Herschrijf dit als:
2.5.3.8.2 Definitieve formule
Omdat \(T^{\mu\nu} = A^\mu B^\nu\), krijgen we:
2.5.3.8.3 Samengevat
De covariante afgeleide van een contravariante tensor \(T^{\mu\nu}\) bestaat uit:
- de gewone afgeleide \(\frac{\partial T^{\mu\nu}}{\partial x^\alpha}\),
- en twee correctietermen met Christoffel-symbolen, één voor elke bovenindex.
De volgorde van indices in het Christoffel-symbool is belangrijk: de eerste index (boven) geeft aan welke tensorindex wordt aangepast, de twee onderste zijn afkomstig uit de afgeleide.
2.5.3.9 Covariante Differentiatie voor een Gemengde Tensor
We bekijken nu hoe de covariante afgeleide wordt toegepast op een gemengde tensor, een tensor die zowel een contravariante als een covariante index heeft.
2.5.3.9.1 Uitgangspunt
Beschouw de gemengde tensor \(T^\mu{}_\nu\), gedefinieerd als het product van een contravariante vector \(A^\mu\) en een covariante vector \(B_\nu\):
De covariante afgeleide van \(T^\mu{}_\nu\) ten opzichte van \(x^\alpha\) is:
2.5.3.9.2 Gebruik van covariante afgeleiden
Vervang de afgeleiden door hun bekende expressies:
Substitueer deze in (\ref{eq:R125}):
Herschrijf dit tot:
2.5.3.9.3 Definitieve formule
Omdat \(T^\mu{}_\nu = A^\mu B_\nu\), volgt:
2.5.4 Kernpunten en Intuïtie
- Christoffel-symbolen \(\Gamma^\mu{}_{\nu\rho}\) beschrijven hoe de basisvectoren veranderen van punt tot punt in gekromde ruimte; zij zijn opgebouwd uit de metriek en haar afgeleiden en zijn zelf geen tensor.
- In vlakke ruimte zijn alle \(\Gamma^\mu{}_{\nu\rho} = 0\), in gekromde ruimte niet, en dat verschil bepaalt o.a. paralleltransport en geodeten.
- De covariante afgeleide corrigeert de gewone afgeleide met termen in \(\Gamma^\mu{}_{\nu\rho}\), zodat het resultaat zich als een tensor gedraagt.
- De Levi-Civita-verbinding is torsievrij en metrisch compatibel \(\nabla_\alpha g_{\mu\nu} = 0\), en daarmee uniek.
Intuïtief
Denk aan lopen op een bol met een pijl in je hand: op een vlak vlak blijft de pijl in dezelfde richting wijzen, op een bol draait hij ten opzichte van het oppervlak. Die "onvermijdelijke" draai wordt gemeten door de Christoffel-symbolen; de covariante afgeleide corrigeert voor deze draai zodat "recht vooruit" in gekromde geometrie betekenis houdt.
Samenvattend overzicht:
| Concept | Betekenis |
|---|---|
| \(\Gamma^i{}_{jk}\) | Compensatieterm bij differentiatie in gekromde ruimte |
| Covariante afgeleide | Afgeleide die "coördinaat-vrij" en tensorieel is |
| \(\nabla_j V^i\) | Gewone afgeleide + correctie via \(\Gamma^i{}_{jk}\) |
| Geometrische betekenis | Paralleltransport, kromming, en richtingsverandering in gekromde ruimte |
2.6 Geodetische Vergelijking en Christoffel-symbolen
Zoals eerder besproken, trachtte Einstein de geometrie van ruimte-tijd zó te formuleren dat een vrij vallend object geen zwaartekracht ervaart, maar in plaats daarvan een "rechte lijn" volgt in een gekromde ruimte-tijd. Zo'n pad wordt een geodeet genoemd.
In deze context is de versnelling van de vierpositie van het object gelijk aan nul. In lokale vrije val volgt het object dus:
Hierbij is \(\tau\) de eigentijd (proper time), gemeten door een waarnemer die zich in een vrij vallend coördinatenstelsel bevindt. De oorsprong van dit stelsel "geeft zich over" aan de zwaartekracht en volgt exact het pad van het vrij vallende object. Een geodetische lijn is de kortste route (in eigen tijd) tussen twee punten, gegeven een bepaalde ruimte-tijdmetriek.
2.6.1 Toelichting bij de termen
2.6.1.1 Lokale (vrij vallende) stelsel \(\xi^\alpha\)
Dit is een coördinatensysteem dat lokaal in de ruimtetijd gedefinieerd wordt. Het is "vrij vallend" omdat de assen van dit stelsel zich gedragen als een deeltje in vrije val, wat betekent dat er op dat moment geen niet-gravitationele krachten op inwerken. Op een zeer kleine schaal (en bij benadering) kunnen de wetten van de fysica in dit systeem vereenvoudigd worden, vergelijkbaar met de lokale wetten in een inertieel (rechtlijnige, constante snelheid) frame.
2.6.1.2 Algemeen gekromd coördinatenstelsel \(x^\mu\)
Dit is een wereldwijd coördinatenstelsel dat de gehele ruimtetijd beschrijft, die over het algemeen gekromd is door massa en energie. De coördinaten \(x^\mu\) kunnen willekeurige coördinaten zijn die gebruikt worden om punten in een gekromde ruimtetijd te specificeren, zonder beperking tot een lokaal inertieel frame.
2.6.1.3 De relatie tussen de twee
De stelling stelt dat er een lokale transformatie bestaat tussen deze twee stelsels, vergelijkbaar met een Lorentz-transformatie, die de relatie tussen de lokale vrij vallende coördinaten \(\xi^\alpha\) en de algemene coördinaten \(x^\mu\) definieert.
2.6.1.4 Betekenis in de fysica
In de algemene relativiteitstheorie beschrijft dit concept dat je in een gekromde ruimtetijd altijd een lokaal "vlak" coördinatensysteem kunt definiëren op elk punt. In dit lokale, "vrije val"-stelsel, lijken de natuurwetten altijd op dezelfde manier te werken als in een speciaal relativistisch, inertieel stelsel, wat de lokale fysica vereenvoudigt. Dit is cruciaal voor het begrijpen van de lokale effecten van zwaartekracht: de zwaartekracht is de manifestatie van de kromming van de ruimtetijd zelf, en in een lokaal vrij vallend stelsel kan men deze kromming negeren.
2.6.1.5 Afleiding via coördinatentransformatie
Stel dat \(\xi^\alpha\) de coördinaten zijn in het lokale (vrij vallende) stelsel, terwijl \(x^\mu\) de coördinaten zijn in een algemeen gekromd coördinatenstelsel. Dan geldt:
De eerste afgeleide wordt:
De tweede afgeleide:
Omdat \(\frac{d^2 \xi^\alpha}{d\tau^2} = 0\) voor een vrij vallend object, volgt:
Om terug te keren naar de x-coördinaten, vermenigvuldigen we beide zijden met \(\frac{\partial x^\beta}{\partial \xi^\alpha}\):
Hier geldt: \(\frac{\partial \xi^\alpha}{\partial x^\mu} \frac{\partial x^\beta}{\partial \xi^\alpha} = \frac{\partial x^\beta}{\partial x^\mu} = \delta^\beta_\mu\) (de Kronecker delta).
Dus:
Herken hierin het Christoffel-symbool:
Daarmee krijgen we de geodetische vergelijking:
2.6.2 Resultaat en Interpretatie
De tweede afgeleide \(\frac{d^2 x^\beta}{d\tau^2}\) wordt dus gecompenseerd door de Christoffel-term. Wanneer er geen zwaartekracht is (dus vlakke ruimte-tijd), zijn alle \(\Gamma^\beta{}_{\mu\nu} = 0\), en volgt het object een rechte lijn: \(\frac{d^2 x^\beta}{d\tau^2} = 0\).
De geodetische vergelijking beschrijft het pad van een vrij vallend deeltje in gekromde ruimte-tijd, d.w.z. het pad met de kortste afstand in de 4D-ruimte-tijd.
De relatie tussen versnelling in het lokale vrije-valstelsel en in het algemene coördinatenstelsel is:
Voor een object op een geodetische baan is de versnelling in het lokale stelsel nul:
Of, anders geschreven:
Waarbij het Christoffel-symbool de relatie bevat tussen het bewegende stelsel \(\xi^\alpha\) en het "rust" stelsel \(x^\beta\):
Opmerking 1: Affiene parameter
Voor massaloze deeltjes zoals fotonen is \(\tau = 0\), waardoor gebruik van de eigentijd niet geschikt is. Daarom gebruiken we een affiene parameter \(\lambda\), zodat de geodetische vergelijking wordt:
De parameter \(\lambda\) verdwijnt vaak in de uiteindelijke fysische uitdrukkingen, wat het gebruik vergemakkelijkt.
Opmerking 2: Lichtsneldheid c
In veel literatuur wordt \(c = 1\) gekozen voor eenvoud. In dit document behouden we echter de lichtsnelheid \(c\) expliciet in de formules. Dit maakt het makkelijker om de dimensies te controleren en vergroot de transparantie van de berekeningen.
2.6.3 Kernpunten en Intuïtie
- Geodeten zijn de "rechtste" mogelijke lijnen in een gekromde ruimte-tijd, denk aan de kortste route tussen twee punten op een bol.
- In de algemene relativiteit beschrijven geodeten het pad dat een vrij bewegend deeltje volgt onder invloed van zwaartekracht (maar zonder andere krachten).
- De geodetische vergelijking luidt:
\begin{align} \frac{d^2 x^\mu}{d\tau^2} + \Gamma^\mu{}_{\nu\rho} \frac{dx^\nu}{d\tau} \frac{dx^\rho}{d\tau} = 0 \end{align}
- Dit is een tweede-orde differentiaalvergelijking die het traject bepaalt in termen van de Christoffel-symbolen \(\Gamma^\mu{}_{\nu\rho}\).
- De vergelijking toont dat de kromming van de ruimte-tijd (via \(\Gamma\)) de versnelling van het pad bepaalt, zonder externe kracht.
Intuïtief
Stel je voor dat je een pijl over een bol laat rollen zonder hem aan te raken:
- De pijl volgt de "rechtste" lijn op de bol - dat is geen rechte lijn in de gebruikelijke zin, maar een grote cirkel zoals de evenaar of een meridiaan.
- Dat pad noemen we een geodeet.
In de relativiteitstheorie:
- Als je een appel laat vallen, volgt die niet een kromme door een kracht, maar een geodeet in een gekromde ruimte-tijd, de kromming van de aarde bepaalt de baan.
- De Christoffel-symbolen in de vergelijking vertellen hoe het pad "afwijkt van rechtdoor", afhankelijk van de geometrie.
Denk aan een GPS die zijn eigen koers aanpast afhankelijk van de bochten in het landschap. Die "correctie" is de rol van \(\Gamma^\mu{}_{\nu\rho}\).
Tabeloverzicht:
| Grootheid | Betekenis |
|---|---|
| \(x^\mu(\tau)\) | Coördinaten van het deeltje als functie van eigen tijd |
| \(\frac{d^2 x^\mu}{d\tau^2}\) | Versnelling langs de wereldlijn |
| \(\Gamma^\mu{}_{\nu\rho}\) | "Afbuigcoëfficiënt" door ruimte-tijdkromming |
| Geodetische vergelijking | Pad zonder externe krachten: zuivere gravitatie |
2.7 Christoffel-symbolen uitgedrukt in termen van de Metrische Tensor
Zoals eerder besproken, bevat de metrische tensor \(g_{\mu\nu}\) alle informatie over de kromming en geometrie van de ruimte-tijd. In dit hoofdstuk zullen we aantonen hoe het Christoffel-symbool \(\Gamma^\beta{}_{\mu\nu}\) kan worden uitgedrukt uitsluitend in termen van de metrische tensor en haar afgeleiden.
2.7.1 Voorwaarden en definities
We vertrekken vanuit de volgende standaardvormen:
- Metrische tensor (vanuit de lokale vlakke ruimte):
\begin{align} g_{\mu\nu} = \eta_{\alpha\beta} \frac{\partial \xi^\alpha}{\partial x^\mu} \frac{\partial \xi^\beta}{\partial x^\nu} \end{align}waarbij \(\eta_{\alpha\beta} = \text{diag}(1,-1,-1,-1)\) de Minkowski-metriek is (zie ook Hoofdstuk 5.6.1).
- Christoffel-symbool (via transformatie):
\begin{align} \Gamma^\beta{}_{\mu\nu} = \frac{\partial x^\beta}{\partial \xi^\lambda} \frac{\partial^2 \xi^\lambda}{\partial x^\mu \partial x^\nu} \end{align}
2.7.2 Omvorming via kettingregel
We beginnen met het herschrijven van de metrische tensor in een iets andere vorm \( g_{\alpha\mu} \):
vanwege symmetrie ⟹
Door de fictieve index \( \alpha \) te vervangen door \( \sigma \):
Door de index \( \nu \) te vervangen door \( \alpha \):
Nu herschrijven we het Christoffel-symbool door elk deel van de vergelijking te vermenigvuldigen met de partiële afgeleide van \( \xi^{\sigma} \) ten opzichte van \( x^{\beta} \):
Of:
of \( \delta_{\lambda\sigma} = 1 \) als \( \sigma = \lambda \) en \( = 0 \) als \( \sigma \ne \lambda \)
Dus samen met (\ref{eq:R154}) wordt dit:
Als \( \sigma = \lambda \) dan vervangen we \( \lambda \) door \( \sigma \):
Dus uit (\ref{eq:R153}):
Met (\ref{eq:R157})) kunnen we afleiden:
Nu herschrijven we:
We weten van hierboven:
Dus:
Voer cyclische permutaties uit:
Neem nu (\ref{eq:R163})+(\ref{eq:R164})-(\ref{eq:R165}):
Door symmetrie:
Isoleren van het Christoffel-symbool:
Verwisselen van \( \rho \) naar \( \beta \):
Gewoonlijk:
Dus in compacte notatie:
2.7.3 Samenvatting
De Christoffel-symbolen zijn volledig uitgedrukt in termen van de metrische tensor \(g_{\mu\nu}\) en haar eerste afgeleiden:
Of in korte notatie:
2.7.4 Kernpunten en Intuïtie
- Christoffel-symbolen \(\Gamma^\lambda{}_{\mu\nu}\) zijn volledig te berekenen op basis van de metrische tensor \(g_{\mu\nu}\).
- De expliciete formule luidt:
\begin{align} \Gamma^\lambda{}_{\mu\nu} = \frac{1}{2} g^{\lambda\rho} \left( \partial_\mu g_{\rho\nu} + \partial_\nu g_{\rho\mu} - \partial_\rho g_{\mu\nu} \right) \end{align}
- De Christoffel-symbolen geven aan hoe coördinaatsystemen lokaal gekromd zijn, en dus hoe vectoren en banen zich gedragen.
- De symmetrie \(\Gamma^\lambda{}_{\mu\nu} = \Gamma^\lambda{}_{\nu\mu}\) blijft behouden zolang de metriek symmetrisch is (wat altijd zo is).
- Deze relatie vormt de brug tussen geometrie en dynamica in de algemene relativiteit.
Intuïtief
De metrische tensor \(g_{\mu\nu}\) vertelt je hoe je afstanden meet in een ruimte (bijv. hoe "ver" iets is in gekromde coördinaten).
Maar: als je in een landschap beweegt en je wilt weten hoe de richting van een pijl verandert als je vooruitgaat, dan heb je meer nodig dan alleen afstanden: je moet weten hoe de meetlatten zelf veranderen. Dat is precies wat de Christoffel-symbolen doen.
Je kunt het zo zien:
- De metriek vertelt je wat recht is op een punt.
- De Christoffel-symbolen vertellen je hoe 'recht' verandert als je beweegt.
Je hoeft de verandering van basisvectoren niet apart op te meten - je kunt hem volledig uitrekenen uit de metriek zelf!
Tabeloverzicht:
| Grootheid | Betekenis |
|---|---|
| \(g_{\mu\nu}\) | Bepaalt lokale afstand en hoek |
| \(\partial_\sigma g_{\mu\nu}\) | Hoe de afstandsdefinitie verandert als je beweegt |
| \(\Gamma^\lambda{}_{\mu\nu}\) | Hoe basisvectoren veranderen, bepaalt afwijking van "rechtdoor" |
| Formule | Afgeleiden van metriek omgezet met inverse metriek |
2.8 Geodetische Vergelijking en haar Newtoniaanse Limiet
De Newtoniaanse zwaartekracht beschrijft hoe materie een zwaartekrachtspotentiaal \(\Phi\) genereert, en hoe, volgens de tweede wet van Newton, die potentiaal leidt tot een versnelling:
Hier is \(\Phi\) de zwaartekrachtpotentiaal, en \(\nabla\) is de Euclidische gradiëntoperator
Hier zijn \( \mathbf{e}_x, \mathbf{e}_y, \mathbf{e}_z \) de eenheidsvectoren langs de respectievelijke assen. Deze beschrijving is accuraat bij lage snelheden, zwakke velden en in een statisch regime. We gaan nu laten zien dat de geodetische vergelijking van de algemene relativiteitstheorie in deze limiet reduceert tot de Newtoniaanse zwaartekrachtvergelijking.
2.8.1 Aannames voor de Newtoniaanse limiet
- Het deeltje beweegt langzaam vergeleken met de lichtsnelheid.
- Het zwaartekrachtsveld is zwak.
- Het veld is statisch, dus het verandert niet met de tijd.
2.8.2 Startpunt: de geodetische vergelijking
De geodetische vergelijking beschrijft de wereldlijn van een deeltje dat alleen door zwaartekracht wordt beïnvloed. We zullen nu laten zien dat in de context van de Newtoniaanse limiet de geodetische vergelijking reduceert tot de zwaartekrachtvergelijking van Newton.
Uit het vorige hoofdstuk weten we dat de geodetische vergelijkingen, met de eigen tijd als parameter van de wereldlijn, als volgt zijn:
De tweede term omvat een som over \( \mu \) en \( \nu \) over alle indices, wat neerkomt op 16 termen. Omdat het deeltje zeer langzaam beweegt ten opzichte van de lichtsnelheid, domineert de tijdcomponent, d.w.z. de 0e component van de vector van het deeltje, de andere ruimtelijke componenten. We komen dan tot de volgende benadering:
De enige term die na benadering overblijft, is de tijdcomponent waarbij dus \( \Gamma^{\beta}_{00} \) en \( \mu = \nu = 0 \). Dit geeft:
Voor de beschrijving van de vierdimensionale ruimte-tijd worden normaal gesproken Griekse letters gebruikt voor de indices, maar wanneer alleen de driedimensionale ruimte wordt beschouwd, is het gebruikelijk om Latijnse letters te gebruiken. Daarom wordt \( \beta \) vervangen door \( i \) (i = x, y, z), resulterend in:
2.8.3 Benadering van het Christoffel-symbool
Uit hoofdstuk Christoffel-symbolen uitgedrukt in termen van de Metrische Tensor (2.7), blijkt dat het Christoffel-symbool kan worden berekend met betrekking tot de componenten van een gegeven metriek waarbij \( x^0 \equiv \tau \):
zo dat het Christoffel-symbool kan worden vereenvoudigd tot:
2.8.4 Zwak-veldbenadering
Als het zwaartekrachtsveld zwak genoeg is, zal ruimte-tijd slechts licht vervormd worden ten opzichte van de zwaartekrachtvrije Minkowski-ruimte-tijd van de Speciale Relativiteitstheorie. Dan kan de ruimte-tijd metriek worden beschouwd als een kleine verstoring van de Minkowski-metriek \( \eta_{\mu\nu} \):
Voor \( g_{00} \) geldt dan:
Dus uit (\ref{eq:R188}) en (\ref{eq:R192}) wordt vergelijking (\ref{eq:R185}):
Door \( g^{ij} = \eta^{ij} - h^{ij} \) te definiëren, vinden we dat
We verkrijgen dan:
Maar aangezien \( \eta^{ij} \) niet nul is voor \( j = i \), dan is \( \eta^{ii} = -1 \) (waarbij i verwijst naar de ruimtelijke componenten) geldt:
We zullen nu de afgeleide aan de linkerkant van \( \tau \) naar \( t \) veranderen, dit gebeurt als volgt:
Eerst wordt in de bovenstaande vergelijking, i door 0 vervangen, waarbij dus \( x^0 = t \):
Aangezien het zwaartekrachtsveld constant is, geldt
2.8.5 Overschakelen naar coördinaattijd
Vervolgens bewerken we de partiële afgeleiden met betrekking tot tau (\( \tau \)):
Zoals we hierboven in (\ref{eq:R200}) hebben gezien, is
Hieruit volgt:
In het algemeen:
2.8.6 Vergelijking in Newton
In vectorvorm:
waarbij
Dit is een andere manier om de Newtoniaanse gravitatiewet
2.8.7 Metrische component in termen van potentiaal
Door de metrische \(g_{00}\) te schrijven als:
is de directe link te zien tussen de metrische tensor (component \(g_{00}\)) aan de linkerkant en het gravitationele potentiaal \(\phi\) aan de rechterkant.
2.8.8 Voorbeeld: berekening van \(h_{00}\) op Aarde
De waarde van \( h_{00} \) op Aarde kan nu worden berekend en gecontroleerd of deze waarde verwaarloosbaar is, wat betekent dat de afwijking ten opzichte van de Minkowski-metriek, als gevolg van het gravitationele veld, is te verwaarlozen.
Of:
Met:
- \( G = 6.67 \times 10^{-11} \, \text{m}^3 \cdot \text{kg}^{-1} \cdot \text{s}^{-2} \)
- \( M_{\text{aarde}} \simeq 6 \times 10^{24} \, \text{kg} \quad R_{\text{aarde}} \simeq 6400 \, \text{km} \)
- \( c \simeq 3 \times 10^8 \, \text{m} \cdot \text{s}^{-1} \)
Verkrijgen we:
Voor de Zon is dit ~\(10^{-6}\) en voor een witte dwerg ~\(10^{-4}\), wat bevestigt dat de zwakveldbenadering over het algemeen geldig is in veel realistische situaties.
2.8.9 Kernpunten en Intuïtie
- In de algemene relativiteit volgen vrije deeltjes een geodeet in gekromde ruimte-tijd.
-
In het klassieke geval (Newton), volgt een deeltje een baan onder invloed van de zwaartekrachtkracht:
\begin{align} \mathbf{a} = -\nabla \Phi \end{align}waarbij \(\Phi\) het gravitatiepotentiaal is.
- In de zwakke-veld-benadering en voor langzame snelheden reduceert de geodetische vergelijking tot deze Newtoniaanse vorm.
- Dit vereist dat:
-
De ruimtetijd nauwelijks gekromd is ⟹
\begin{align} g_{\mu\nu} = \eta_{\mu\nu} + h_{\mu\nu} \end{align}
-
Alleen \( g_{00} \) significant afwijkt van de vlakke Minkowski-metriek ⟹
\begin{align} g_{00} \approx -\left(1 + \frac{2\phi}{c^2}\right) \end{align}
-
De component \( \Gamma^{i}_{00} \) blijkt in deze benadering gelijk te zijn aan
\begin{align} \frac{1}{2}\partial_i g_{00} \approx \frac{1}{c^2}\partial_i \phi \end{align}wat leidt tot Newtons zwaartekrachtsvergelijking.
Intuïtief
Einsteins theorie moet in het alledaagse leven dezelfde voorspellingen doen als Newtons theorie. Dat wil zeggen:
- Als zwaartekracht zwak is (bijv. rond de aarde),
- En de snelheden veel kleiner zijn dan het licht (bijv. vallende appels),
- Dan moet de relativistische formule overgaan in de klassieke.
De geodetische vergelijking zegt: “een deeltje beweegt in kromme ruimte-tijd, zonder kracht”. Maar in zwakke velden kun je die kromming schrijven als een kleine afwijking van vlakke ruimte. En die afwijking zie je dan als een “effectieve kracht” - precies zoals Newton het beschreef!
Dus: Newton’s zwaartekracht is een limietgeval van de algemene relativiteitstheorie. De appel valt, niet door een kracht, maar omdat de tijdscomponent \( g_{00} \) iets gekromd is door de massa van de aarde.
Samenvattende vergelijkingstabel:
| Theorie | Formule | Interpretatie |
|---|---|---|
| Newton (klassiek) | \( \mathbf{a} = -\nabla \Phi \) | Versnelling door kracht |
| Einstein (zwakke limiet) | \( \frac{d^2 x^i}{dr^2} = -\Gamma^{i}_{00} \) | Afwijking van rechte lijn door tijdskromming |
| Link tussen beide | \( \Gamma^{i}_{00} = \frac{1}{2}\partial_i g_{00} \approx \frac{1}{c^2}\partial_i \phi \) | \( g_{00} \) encodeert het potentiaal |
2.9 Generaliseren van de Definitie van de Metrische Tensor
In de vorige secties hebben we gezien hoe de geodetische vergelijking wordt gegeneraliseerd van een inertiaalstelsel naar een willekeurig coördinatenstelsel. Op een vergelijkbare manier breiden we nu de definitie van het lijnelement uit van vlakke Minkowski-ruimte-tijd naar een algemene gekromde ruimte-tijd, een zogenoemde pseudo-Riemann-variëteit. Deze structuur vormt de wiskundige basis van de algemene relativiteitstheorie.
2.9.1 Het Minkowski-lijnelement in een lokaal inertiaalstelsel
In een lokaal inertiaalstelsel gebruiken we de coördinaten \( \xi^\alpha \), gedefinieerd als:
Het Minkowski-lijnelement kan als volgt worden beschreven (zie ook Onafhankelijkheid van het Gekozen Coördinatenstelsel 2.2.2) vergelijking (\ref{eq:R2242}) en zie ook 5.6.1 Uitgebreide Toelichting op de Metrische Tensor)
Het bijbehorende lijnelement luidt:
waarbij \( \eta_{\alpha\beta} \) de Minkowski-metriek is:
2.9.2 Coördinatentransformatie naar een algemeen stelsel
We gaan nu over naar een willekeurig, mogelijk gekromd coördinatenstelsel \(x^\mu\), waarin de oude coördinaten \(\xi^\alpha\) functies zijn van de nieuwe:
De differentiële verandering \(d\xi^\alpha\) wordt dan via de kettingregel:
Door gebruik te maken van de Einstein-sommatieconventie:
Daarmee kunnen we het lijnelement herschrijven als:
2.9.3 Definitie van de algemene metrische tensor
We definiëren nu de metrische tensor \(g_{\mu\nu}\) als:
Zodat het lijnelement in het nieuwe stelsel wordt:
2.9.4 Eigenschappen van de metrische tensor
De eigenschappen van de metrische tensor zijn:
- Symmetrie:
\begin{align} g_{\mu\nu} = g_{\nu\mu} \end{align}Dit volgt direct uit de definitie, aangezien de Minkowski-metriek symmetrisch is.
- Inverse metriek:
\begin{align} g^{\mu\sigma} g_{\sigma\nu} = \delta^\mu_\nu \end{align}waarbij \(\delta^\mu_\nu\) de Kronecker-delta is.
- Covariant versus contravariant:
De inverse \(g^{\mu\nu}\) wordt de contravariante metriek genoemd; \(g_{\mu\nu}\) is de covariante metriek.
2.9.5 Belang van de metriek in de relativiteit
De metrische tensor bevat alle informatie over de structuur van ruimte-tijd. Zij bepaalt afstanden, hoeken, kromming en dus ook het gedrag van objecten onder invloed van zwaartekracht. In de context van de algemene relativiteitstheorie is zwaartekracht niets anders dan een manifestatie van kromming van ruimte-tijd. Die kromming wordt volledig beschreven door de metriek.
Daarom is het fundamentele doel van de algemene relativiteitstheorie het vinden van \(g_{\mu\nu}\), de metriek, als oplossing van de Einstein-veldvergelijkingen. Eenmaal bekend, bepaalt deze tensor het verloop van vrije beweging, de kromming van ruimte en tijd, en de interactie met energie en massa.
2.9.6 Aantal onafhankelijke componenten
Hoewel \(g_{\mu\nu}\) op het eerste gezicht 16 componenten bevat (in een 4×4-matrix), is zij symmetrisch: \(g_{\mu\nu} = g_{\nu\mu}\). Hierdoor blijven er slechts 10 onafhankelijke componenten over. Deze tien functies van ruimte-tijd vormen de onbekenden in Einsteins veldvergelijkingen.
2.9.7 Kernpunten en Intuïtie
- De metrische tensor \(g_{\mu\nu}\) definieert de afstand in ruimte-tijd via het lijn-element:
\begin{align} ds^2 = g_{\mu\nu} dx^\mu dx^\nu \end{align}
- Deze formule geldt in elk coördinatenstelsel, vlak of gekromd, zolang \(g_{\mu\nu}\) correct wordt aangepast.
- De metriek is:
- Symmetrisch: \(g_{\mu\nu} = g_{\nu\mu}\)
- Tensorieel: verandert volgens tensortransformaties bij coördinatenwissels.
- De metriek bevat alle informatie over de lokale geometrie: afstand, hoek, volume en lichtkegels.
- In gekromde ruimte is de metriek plaatsafhankelijk: \(g_{\mu\nu} = g_{\mu\nu}(x)\)
- Door generalisatie wordt de metriek het fundamentele object waarop alle andere geometrische grootheden gebaseerd zijn (Christoffel-symbolen, Riemann-tensor, etc.).
Intuïtief
In de speciale relativiteit is afstand in de ruimte-tijd iets als:
In de algemene relativiteit zeggen we: de ruimte-tijd zelf is vervormbaar, dus die afstandsformule moet worden aangepast aan de kromming. Dat doen we met een metrische tensor \(g_{\mu\nu}\), die op elk punt vertelt hoe ruimte en tijd gemeten worden.
Je kunt het zien als een meetlat die lokaal verandert van vorm afhankelijk van waar je staat. Soms is een “meter” meer of minder dan elders, en hoeken kunnen schuin worden getrokken, afhankelijk van de massa/energie in de buurt.
De generalisatie betekent dat we niet langer een universele, vaste formule hebben voor afstand, maar een flexibel veld dat op elk punt anders is, en tensorieel gedraagt.
Tabeloverzicht
| Grootheid | Betekenis |
|---|---|
| \(g_{\mu\nu}(x)\) | Lokaal meetrecept voor ruimte-tijd |
| Symmetrie | \(g_{\mu\nu} = g_{\nu\mu}\) |
| Tensor-transformatie | Metriek past zich aan bij coördinatenwissel |
| Afstand | \(ds^2 = g_{\mu\nu} dx^\mu dx^\nu\) |
| Speciale limiet | \(g_{\mu\nu} = \eta_{\mu\nu}\) (Minkowski-metriek) |
2.10 De Riemann-Krommingstensor
De Riemann-krommingstensor is een van de belangrijkste concepten in de algemene relativiteitstheorie. Deze tensor beschrijft hoe ruimte-tijd lokaal gekromd is als gevolg van de aanwezigheid van massa en energie. Hij bepaalt hoe vectoren veranderen bij parallel transport langs kromme paden rond een gesloten lus.
In vlakke, Euclidische ruimte, waarin geen zwaartekrachtseffecten voorkomen, verdwijnt de Riemann-tensor: \(R^\rho_{\sigma\mu\nu} = 0\) (in vlakke ruimte-tijd).
In dit hoofdstuk leiden we de Riemann-tensor af op twee manieren:
- Via de commutator van twee covariante afgeleiden
- Via de methode van geodetische deviatie
2.10.1 Afleiding via de Commutator van de Covariante Afgeleiden
Met behulp van het concept van parallel transport van vectoren of tensoren zullen we de uitdrukking voor de Riemann-tensor afleiden.
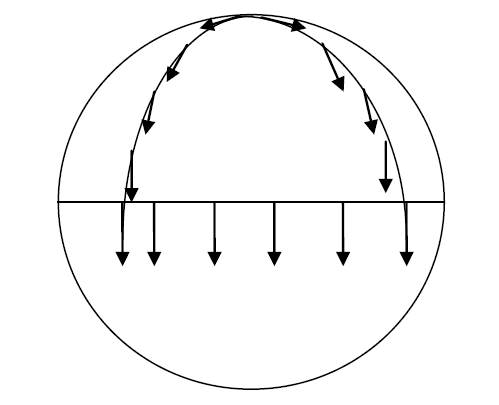
Een intuïtief voorbeeld van kromming vinden we op het aardoppervlak. Stel dat we met een horizontaal gehouden stok van de Noordpool langs een meridiaan naar de evenaar lopen. Daar draaien we 90 graden, lopen over de evenaar, en keren via een andere meridiaan terug naar de Noordpool. Ondanks dat we de stok in "gelijke richting" houden, wijst deze na terugkeer in een andere richting. Dit verschil komt door de kromming van het oppervlak.
Op een gelijkaardige manier kunnen we in een infinitesimale lus op een variëteit een vector parallel transporteren. In vlakke ruimte verandert de vector niet; in gekromde ruimte wél. Dit verschil bij parallel transport is rechtstreeks gekoppeld aan de Riemann-tensor.
We definiëren parallel transport als beweging waarbij de covariante afgeleide van een vector nul is. Om de Riemann-tensor af te leiden, onderzoeken we hoe het resultaat van tweemaal covariant differentiëren afhangt van de volgorde. De commutator van de covariante afgeleiden geeft ons die maat voor kromming.
2.10.1.1 Covariante Afgeleide Commutator
Een commutator verwijst hier naar het verschil tussen twee bewerkingen, waarbij de ene in de ene richting plaatsvindt en de andere in de tegenovergestelde richting. De commutator wordt gedefinieerd als:
De commutator is dus alleen nul wanneer de volgorde van de twee bewerkingen niet relevant is.
Om de Riemann-tensor te verkrijgen, wordt de covariante afgeleide als bewerking gekozen. De commutator van twee covariante afgeleiden meet het verschil tussen het parallel transporteren van de tensor eerst in de ene richting en vervolgens in de tegenovergestelde richting. Dus, als maat voor het verschil van de tensor langs het pad, wordt de covariante afgeleide van de tensor gebruikt.
In een vlakke ruimte maakt de volgorde van covariante afleidingen geen verschil, omdat covariante differentiatie terugvalt op partiële differentiatie, en daarom moet de commutator nul opleveren. Omgekeerd kan elk niet-nul resultaat van het toepassen van de commutator op covariante differentiatie worden toegeschreven aan de kromming van de ruimte, en dit wordt daarom aangeduid als de Riemann-tensor.
2.10.1.2 Afleiding van de Riemann-Tensor
Het doel is nu om de Riemann-tensor af te leiden door de volgende commutator te vinden:
We weten dat de covariante afgeleide van \(V_a\) gegeven is door (zie vergelijking (\ref{eq:R94}):
En dat deze afgeleide zelf een tensor is. Zoals we in het vorige hoofdstuk hebben gezien:
(zie vergelijking (\ref{eq:R109}))
Dit betekent dat:
Dus, de covariante afgeleide van een vector \((\nabla_b V_a)\) is een tensor (zie vergelijking (\ref{eq:R109})). De covariante afgeleide van een tensor is (zie vergelijking (\ref{eq:R118})):
Dit resulteert in:
De eerste term aan de rechterkant:
Uitgewerkt:
De tweede en derde termen aan de rechterkant:
Door de drie termen ((\ref{eq:R242}), (\ref{eq:R243}),(\ref{eq:R244}) samen te voegen in (\ref{eq:R240}) krijgen we:
Door b en c te verwisselen, vinden we:
Door (\ref{eq:R246}) van (\ref{eq:R245}) af te trekken compenseren de eerste en laatste termen elkaar. Aangezien het Christoffel-symbool symmetrisch wat betreft de onderste indices, dan krijgen we:
Door de haakjes in de laatste termen uit te werken en de termen met \(V_d\) te factoriseren:
Vanuit vergelijking (\ref{eq:R251}) in het vorige hoofdstuk weten we:
Daarom:
Of, samengevoegd en gehergroepeerd door de vector \(V_d\) expliciet te factoriseren:
Na het verwisselen van d met e in de eerste en de derde term aan de rechterkant:
We definiëren de uitdrukking binnen de haakjes aan de rechterkant als de Riemann-tensor, wat betekent dat:
Dit is de componentvorm van de Riemann-tensor, die expliciet de afgeleiden van de Christoffel-symbolen en hun producten bevat. Deze uitdrukking laat zien hoe kromming een intrinsiek geometrisch effect is dat niet weggenomen kan worden door een verandering van coördinaten.
Opmerking: Hier kan de commutator worden beschouwd als het verschil van twee vectoren. De grootte van de resulterende vector is de Riemann-tensor.
2.10.1.3 Alternatieve Afleiding van de Riemann-Tensor via de Commutator
We beschouwen een infinitesimaal gebied waarover een vector wordt verplaatst (parallel getransporteerd) via twee verschillende paden. Wanneer de variëteit vlak is, zou het verschil tussen de twee eindvectoren nul zijn. Echter, in het geval dat de variëteit intrinsiek gekromd is, zou dit leiden tot een verschil tussen de eindvectoren.
Eerst verplaatsen we een vector \(V\) van punt A via B naar C. Om de richting van de beweging van de vector te bepalen, nemen we de afgeleide van de vector met respect tot \(dx^\mu\) en vervolgens bekijken we de verandering van dit resultaat met respect tot \(dx^\nu\).
Daarna doen we hetzelfde van A via D naar C, nu eerst met respect tot \(dx^\nu\) en vervolgens tot \(dx^\mu\). Dan trekken we beide resultaten van elkaar af, wat zou moeten leiden tot de Riemann-tensor.

De vector \( e_m \) is de raakvector, dus de afgeleide van de positievector of de afgeleide van het traject. Als het traject een rechte lijn is, dan is \( e_m \) een constante; en bijgevolg is de afgeleide van \( e_m \), en dus het Christoffel-symbool, nul.
Eerst van A naar B om de richting te bepalen, nemen we de afgeleide (zie ook vergelijking (\ref{eq:R250})):
Verander de twee dummy-indices, \( k \) en \( m \). Dan kan de formule worden aangepast van \( k \) naar \( m \) en \( m \) naar \( \gamma \):
Dit is de covariante afgeleide van de contravariante vector \( V \). En uit de definitie van het Christoffel-symbool in de vorige hoofdstukken weten we dat:
Vervolgens de verandering van de richting van B naar C met betrekking tot \( dx^\nu \):
Vervang in het rechterlid van de vergelijking in de tweede term de indices \( k \) met \( m \) en \( m \) met \( \gamma \), en verwissel in de vijfde term \( k \) en \( m \):
Nu voor de andere richting, verwissel \( \mu \) en \( \nu \):
Trek nu de laatste twee vergelijkingen van elkaar af:
De vijfde-zesde, zevende-achtste en negende-tiende termen zijn nul.
Dus:
2.10.1.4 Definitie van de Riemann-tensor
De uitdrukking binnen de haakjes wordt gedefinieerd als de Riemann-tensor:
Waarbij de Riemann-tensor de mate van kromming van de ruimte-tijd beschrijft door het verschil in parallel transport van een tensor rond een gesloten lus.
2.10.1.5 Conclusie
Deze alternatieve afleiding van de Riemann-tensor via de commutator biedt een manier om te begrijpen hoe de kromming van de ruimte-tijd wordt bepaald door het verschil in parallel transport van tensoren. De Riemann-tensor is dus een cruciaal hulpmiddel in de algemene relativiteitstheorie voor het beschrijven van de geometrie en de gravitationele effecten in de ruimte-tijd.
2.10.2 Afleiding van de Riemann-Tensor via Geodetische Deviatie
In het vorige hoofdstuk hebben we een methode getoond om de Riemann-tensor af te leiden uit de commutator van covariante afgeleiden, dat fysiek overeenkomt met het verschil tussen het parallel transporteren van een vector eerst over het ene pad en dan over het andere. Een andere interpretatie komt voort uit de relatieve versnelling van nabijgelegen deeltjes in vrije val.
Stel je een wolk van deeltjes voor in vrije val. Laten we aannemen dat een waarnemer met een van deze deeltjes meereist. Hij kijkt naar een nabijgelegen deeltje en meet de positie ervan in lokale inerte coördinaten. In de Speciale Relativiteitstheorie zal dit deeltje zich in een rechte lijn met constante snelheid bewegen, zonder versnelling. Maar wat gebeurt er in een gravitatieveld?
Zoals we ons herinneren uit het vorige hoofdstuk, generaliseert een geodetische lijn het begrip van een "rechte lijn" naar gekromde ruimte-tijd.
Hier zullen we laten zien hoe de evolutie van de afstand gemeten tussen twee naburige geodetische lijnen, ook wel geodetische deviatie genoemd, inderdaad gerelateerd kan zijn aan een niet-nul kromming van de ruimte-tijd, of in Newtoniaanse termen, aan de aanwezigheid van getijdenkrachten. Laten we dus twee deeltjes beschouwen die twee zeer nabije geodetische lijnen volgen.
Hun respectieve pad kan worden beschreven door de functies \( x^\mu(\tau) \) (voor het referentiedeeltje) en \( y^\mu(\tau) \equiv x^\mu(\tau) + \xi^\mu(\tau) \) (voor het tweede deeltje) waarbij \( \tau \) (tau) de eigen tijd langs de wereldlijn van het referentiedeeltje is, en waarbij \( \xi^\mu \) verwijst naar de afwijkingsvier-vector die het ene deeltje met het andere verbindt op elk gegeven moment \( \tau \).
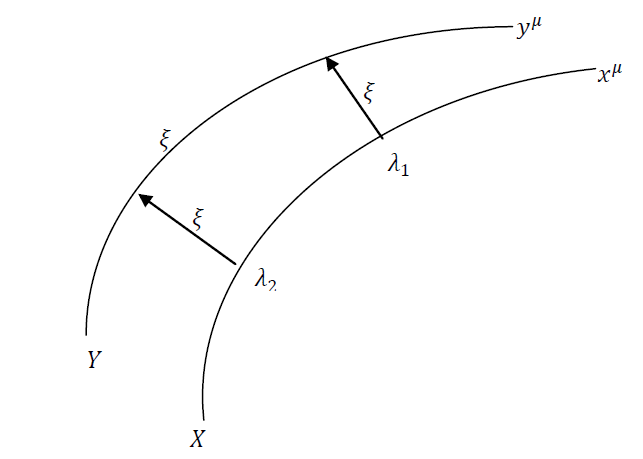
Ons doel in dit hoofdstuk is om aan te tonen dat deze relatieve versnelling gerelateerd is aan de Riemann-tensor via de volgende vergelijking:
In het geval dat de ruimte-tijd vlak is, is de Riemann-tensor nul, wat resulteert in een nul relatieve versnelling.
Aangezien elk deeltje een geodetische lijn volgt, is de vergelijking van hun respectieve coördinaat als volgt (zie vergelijking (\ref{eq:R144})):
In elk van deze vergelijkingen is het Christoffel-symbool gelijk op elke respectievelijke positie van de deeltjes \( x \) en \( y \). Aangezien de scheiding tussen de deeltjes infinitesimaal is, evalueren we het Christoffel-symbool op de positie \( y^\alpha(\tau) \) door middel van een Taylor-reeksontwikkeling:
Bij benadering tot de eerste afgeleide omdat \( \xi \) infinitesimaal is:
Dit kan ook benaderd worden als volgt voor een infinitesimale \( \Delta x \):
Met de aanname dat \( y^\alpha(\tau) = x^\alpha(\tau) + \xi^\alpha(\tau) \) en door deze laatste uitdrukking te vervangen in de geodetische vergelijking van deeltjes \( y \), krijgen we:
Hier worden het Christoffel-symbool en zijn eerste orde afgeleiden nu geëvalueerd op \( x^\alpha(\tau) \).
Door alle termen in de haakjes uit te werken en de termen van de tweede orde met betrekking tot \( \xi \) te verwaarlozen, krijgen we:
Aangezien we weten dat het Christoffel-symbool symmetrisch is ten opzichte van de lagere indices, kunnen deze worden omgewisseld:
Door de geodetische vergelijking van deeltje x te gebruiken, zoals gegeven (zie vergelijking (\ref{eq:R144})):
Dan vallen de eerste en de derde term weg. Dan verkrijgen we:
Hier is
Vervolgens hebben we een uitdrukking voor
Door de dummy-index \(\alpha\) te vervangen door \(\sigma\) in de tweede term en gebruik te maken van de definitie van het Christoffel-symbool, krijgen we:
Zodat:
Aangezien we nog steeds te maken hebben met de voorwaarde dat \(\xi\) een vier-vector is, is de afgeleide ervan met respect tot de eigen tijd ook een vier-vector, dus we kunnen de tweede absolute afgeleide vinden door dezelfde ontwikkeling te gebruiken als voor de afgeleide van eerste orde.
Door de Christoffel-symbolen en Taylorreeks boven te gebruiken en \(\nu\) te vervangen door \(\sigma\) in de eerste term, krijgen we:
We kunnen de tweede term herschrijven, aangezien de Christoffel-symbolen afhankelijk zijn van \(\tau\) door afhankelijk te zijn van de positie van het referentiedeeltje:
Door de geodetische vergelijking te gebruiken, kunnen we de derde term herschrijven, d.w.z. \(\frac{du^\mu}{d\tau}\) uitwerken:
Ook, om een uitdrukking voor \(u^\nu u^\mu \xi^\sigma\) te verkrijgen, met alleen \(\mu,\nu\) en \(\sigma\), kunnen we de laatste term herschrijven door de dummy-indices \(\sigma\) en \(\beta\) te hernoemen:
Dus uiteindelijk kunnen we, door alle termen te vervangen, schrijven:
Door de eerste en de vijfde term te schrappen en de gemeenschappelijke factor \(u^\nu u^\mu \xi^\sigma\) eruit te halen verkrijgen we:
Omdat dit nog steeds een tensorvergelijking is, is de hoeveelheid tussen de haakjes een tensor en kunnen we de Riemann-tensor definiëren als:
Dan kunnen we de bovenstaande vergelijking herschrijven in een kortere uitdrukking, bekend als de geodetische deviatievergelijking:
Aangezien de enige grootheid in deze vergelijking die intrinsiek afhankelijk is van de metriek de Riemann-tensor is, zien we dat als deze identiek aan nul is dat dan de ruimte-tijd vlak is. Maar als slechts één component van deze tensor niet nul is, dan is de ruimte-tijd gekromd.
2.10.3 Kernpunten en Intuïtie
- De Riemann-tensor \(R_{\sigma\mu\nu}^{\rho}\) is de fundamentele tensor die kromming van ruimte-tijd beschrijft.
- Ze kan worden afgeleid via de commutator van covariante afgeleiden, of via de geodetische deviatievergelijking.
- Haar componentvorm is:
\begin{align} R_{\mu\sigma\nu}^{\alpha}=\frac{d\Gamma_{\mu\nu}^{\alpha}}{dx^{\sigma}}-\frac{d\Gamma_{\mu\sigma}^{\alpha}}{dx^{\nu}}+\Gamma_{\gamma\sigma}^{\alpha}\Gamma_{\nu\mu}^{\gamma}-\Gamma_{\nu\gamma}^{\alpha}\Gamma_{\mu\sigma}^{\gamma} \end{align}
- Voor een geodetische lijn geldt de volgende eigenschap:
\begin{align} 0=\frac{d^2 x^\beta}{d\tau^2}+\Gamma_{\mu\nu}^{\beta}\frac{\partial x^\mu}{\partial \tau}\frac{\partial x^\nu}{\partial \tau} \quad \text{Geodetische vergelijking} \end{align}
- Of:
\begin{align} \frac{d^2 x^\beta}{d\tau^2}=-\Gamma_{\mu\nu}^{\beta}u^\nu u^\mu \end{align}
- Terwijl voor de afwijking van één geodetische naar een infinitesimaal nabijgelegen geodetische lijn geldt:
- Een niet-nul Riemann-tensor impliceert gekromde ruimte-tijd en daarmee de aanwezigheid van zwaartekracht.
- Meet het niet-commutativiteitseffect van tweemaal covariant afleiden van een vector:
\begin{align} \left(\nabla_\mu\nabla_\nu-\nabla_\nu\nabla_\mu \right) V^\rho=R_{\sigma\mu\nu}^{\rho}V^\sigma \end{align}
De tensor is volledig uit te drukken in termen van Christoffel-symbolen en hun afgeleiden.
- In vlakke ruimte is \(R_{\sigma\mu\nu}^{\rho}=0\); in gekromde ruimte is zij in het algemeen niet nul.
- Kromming is lokaal meetbaar via het gedrag van geodeten: als twee vrije deeltjes die dicht bij elkaar starten van elkaar gaan afwijken, duidt dat op kromming.
Intuïtief
Stel je twee raketten voor die naast elkaar in de ruimte beginnen te vliegen, zonder motoren (vrij vallend), elk op een iets andere positie. In vlakke ruimte blijven ze parallel, maar in gekromde ruimte (bijv. rond een planeet) zullen ze naar elkaar toe of van elkaar af buigen.
De Riemann-tensor meet precies dat effect:
- Hoe verandert de “richting” van een vector als je hem transporteert in een gesloten lus?
- Als het resultaat afwijkt van de oorspronkelijke vector, is de ruimte gekromd.
Je kunt het vergelijken met een pijl die je meeneemt op een rondje over een bol: na terugkomst staat hij niet meer in dezelfde richting, kromming laat zich zien als richtingsverandering.
Tabeloverzicht:
| Grootheid | Betekenis |
|---|---|
| \(R^\rho_{\sigma\mu\nu}\) | Meet kromming door vergelijking van transport |
| Bouwstenen | Christoffel-symbolen + hun afgeleiden |
| Fysieke betekenis | Afwijking tussen nabije geodeten |
| Nul in vlakke ruimte | \(R^\rho_{\sigma\mu\nu}\) |
| Dimensie | 4e-rangs tensor (4 indices) |
2.11 Symmetrieën en Onafhankelijke Componenten
In de voorgaande hoofdstukken hebben we de vrij complexe uitdrukking voor de Riemann-krommingstensor afgeleid, een combinatie van afgeleiden en producten van Christoffel-symbolen, met in totaal 256 (=4⁴) componenten in een vierdimensionale ruimte-tijd. In dit hoofdstuk tonen we aan dat de Riemann-tensor in werkelijkheid slechts 20 onafhankelijke componenten heeft, en dat deze volledig worden bepaald door de symmetrieën van de tensor en de tweede-orde afgeleiden van de metriek.
We onderzoeken deze symmetrieën in een Lokaal Inertiaal Frame (LIF), waarin alle Christoffel-symbolen in de oorsprong nul zijn. Deze symmetrieën zijn echter niet beperkt tot dit specifieke stelsel: omdat tensorvergelijkingen coördinaten-onafhankelijk zijn, gelden ze in elk referentiekader.
2.11.1 Definitie en Herformulering
De Riemann-tensor is in het algemeen gedefinieerd als:
Wetende dat alle Christoffel-symbolen, \(\Gamma = 0\), nul zijn in de oorsprong van het Lokale Inertiaal Frame, reduceert dit tot:
Door het contractiemechanisme toe te passen, kunnen we de Riemann-tensor herschrijven met alle indices verlaagd:
De Christoffel-symbolen kunnen worden uitgedrukt in termen van de metriek:
Zodat we kunnen schrijven:
De tweede term is nul omdat de Christoffel-symbolen nul zijn op de oorsprong van het lokale inertiële frame, zoals hierboven vermeld:
Met dit resultaat en uit vergelijking (\ref{eq:R328}) volgt:
Wisselen van indices \(\mu\) en \(\nu\), leidt tot de tweede term van de uitdrukking van de Riemann-tensor:
De middelste termen verdwijnen na het aftrekken van de laatste twee uitdrukkingen, wat resulteert in:
Vermenigvuldigd met \(-1\):
Wisselen van \(\mu\) en \(\nu\) in (2):
Dus, uit (333) en (334) krijgen we:
Houd er rekening mee dat deze vergelijking alleen geldig is op de oorsprong van het Lokale Inertiële Frame. Maar aangezien dit tensorvergelijkingen zijn en, zoals we weten, als deze tensorvergelijkingen geldig zijn in één referentiekader, zijn ze geldig in elk referentiekader.
Nu zullen we op een vergelijkbare manier aantonen dat de Riemann-tensor antisymmetrisch is door de eerste twee indices te verwisselen:
Als we de eerste en derde indices (\(\alpha \leftrightarrow \mu\)), en ook de tweede en vierde (\(\beta \leftrightarrow \nu\)), verwisselen, krijgen we:
Als we de laatste drie indices \(\beta,\mu\) en \(\nu\) cyclisch permuteren en de drie termen optellen, krijgen we:
2.11.2 Symmetrie-eigenschappen
Uit de bovenstaande uitdrukking kunnen we de volgende symmetrieën van de Riemann-tensor afleiden:
-
Antisymmetrie in de laatste twee indices:
\begin{align} R_{\alpha\beta\mu\nu} = - R_{\alpha\beta\nu\mu} \end{align} -
Antisymmetrie in de eerste twee indices:
\begin{align} R_{\alpha\beta\mu\nu} = - R_{\beta\alpha\mu\nu} \end{align} -
Symmetrie onder verwisseling van indexparen:
\begin{align} R_{\alpha\beta\mu\nu} = R_{\mu\nu\alpha\beta} \end{align} -
De eerste Bianchi-identiteit (cyclische symmetrie):
\begin{align} R_{\alpha\beta\mu\nu} + R_{\alpha\nu\beta\mu} + R_{\alpha\mu\nu\beta} = 0 \end{align}
Of weergegeven als:
De antisymmetrie betekent dat de tensor verandert van teken bij verwisseling van deze indices, wat samenhangt met de richting van lus-integratie bij paralleltransport.
2.11.3 Aantal Onafhankelijke Componenten
In een vierdimensionale ruimte-tijd, met vier waarden per index, zou een willekeurige (0,4)-tensor 256 componenten hebben. Door de hierboven genoemde symmetrieën vermindert dit aantal drastisch:
- Door antisymmetrie in \( \alpha\beta \) en \( \mu\nu \): van \( 4^4 = 256 \) naar \( \binom{4}{2} \times \binom{4}{2} = 6 \times 6 = 36 \)
- Symmetrie tussen de paren: \( 36 \rightarrow \dfrac{6 \times (6+1)}{2} = 21 \)
- Bianchi-identiteit: vermindert het aantal verder tot 20 onafhankelijke componenten
Hierbij is dus \(\mu\nu\) is een antisymmetrisch paar.
Aantal onafhankelijke combinaties:
\( \binom{4}{2} \times \binom{4}{2} \)
2.11.4 Kernpunten en Intuïtie
-
De Riemann-tensor \( R_{\rho\sigma\mu\nu} \) bezit meerdere symmetrieën, waardoor het aantal onafhankelijke componenten sterk wordt beperkt:
- Antisymmetrie in laatste twee indices:
\begin{align} R_{\rho\sigma\mu\nu} = - R_{\rho\sigma\nu\mu} \end{align} - Antisymmetrie in eerste twee indices:
\begin{align} R_{\rho\sigma\mu\nu} = - R_{\sigma\rho\mu\nu} \end{align} - Symmetrie bij verwisselen van indexparen:
\begin{align} R_{\rho\sigma\mu\nu} = R_{\mu\nu\rho\sigma} \end{align} - Bianchi-identiteit (contractie-eigenschap):
\begin{align} R_{\rho\sigma\mu\nu} + R_{\rho\mu\nu\sigma} + R_{\rho\nu\sigma\mu} = 0 \end{align}
- Antisymmetrie in laatste twee indices:
- Door deze symmetrieën heeft de Riemann-tensor in 4D slechts 20 onafhankelijke componenten, niet 256.
Dus hoewel de oorspronkelijke uitdrukking van de Riemann-tensor complex lijkt, wordt deze dankzij zijn rijke symmetriestructuur volledig bepaald door slechts 20 onafhankelijke componenten. Deze componenten representeren alle mogelijke vormen van kromming in een vierdimensionale ruimte-tijd en vormen daarmee de kern van de geometrische beschrijving van zwaartekracht in de algemene relativiteitstheorie.
Intuïtief
Stel je een kubus voor met 4 indexposities - in theorie zouden er \( 4 \times 4 \times 4 \times 4 = 256 \) componenten zijn. Maar door symmetrieën zoals:
- “als je deze twee indices verwisselt, verandert alleen het teken”
- “als je de paren verwisselt, blijft het gelijk”
blijkt dat veel van die 256 waarden met elkaar samenhangen. Denk aan een schilderij met spiegelsymmetrie: als je één helft kent, weet je ook wat er aan de andere kant moet staan. Zo werkt het ook met de structuur van de Riemann-tensor.
Deze eigenschappen zijn geen toeval, maar komen voort uit de manier waarop de tensor wordt afgeleid uit de metriek en haar afgeleiden.
Tabeloverzicht:
| Symmetrie | Uitleg |
|---|---|
| \( R_{\rho\sigma\mu\nu} = - R_{\rho\sigma\nu\mu} \) | Antisymmetrie in laatste twee indices |
| \( R_{\rho\sigma\mu\nu} = - R_{\sigma\rho\mu\nu} \) | Antisymmetrie in eerste twee indices |
| \( R_{\rho\sigma\mu\nu} = R_{\mu\nu\rho\sigma} \) | Verwisselen van indexparen |
| Bianchi-identiteit | Lineaire relatie tussen permutaties van indices |
| Totaal in 4D | 20 onafhankelijke componenten |
2.12 Bianchi-Identiteit en Ricci Tensor
De Bianchi-identiteit speelt een cruciale rol bij het afleiden van de veldvergelijkingen van Einstein. Hoewel de Riemann-krommingstensor zelf niet direct in deze vergelijkingen voorkomt, kunnen we uit deze tensor, via contractie, twee andere belangrijke krommingsgrootheden afleiden: de Ricci-tensor en de Ricci-scalar.
In dit hoofdstuk zullen we deze drie fundamentele objecten introduceren en hun onderlinge verband toelichten, te beginnen met de afleiding van de Bianchi-identiteit.
2.12.1 Bianchi-identiteit
De Bianchi-identiteit luidt:
Uit het vorige hoofdstuk 2.11 Symmetrieën en Onafhankelijke Componenten weten we dat in de oorsprong van een Lokaal Inertieel stelsel de Riemann-tensor geschreven kan worden als:
Omdat de Christoffel-symbolen in de oorsprong van dit stelsel verdwijnen, wordt de covariante afgeleide daar gelijk aan de gewone afgeleide:
Substitutie van de uitdrukking voor de Riemann-tensor levert:
Door de index van de afgeleide cyclisch te permuteren met de laatste twee indices, \(\mu,\nu\), van de tensor, krijgen we:
Door deze drie vergelijkingen op te tellen en gebruik te maken van de commutativiteit van partiële afgeleiden, zien we dat de termen paargewijs elkaar opheffen, en krijgen we de Bianchi-identiteit:
Deze Bianchi-identiteit is een tensorvergelijking die universeel geldig is, in elk coördinatenstelsel.
2.12.2 Kernpunten en Intuïtie
-
De Bianchi-identiteit is een fundamentele identiteit voor de Riemann-tensor:
\begin{align}\nabla_\lambda R^\rho_{\sigma\mu\nu} + \nabla_\mu R^\rho_{\sigma\nu\lambda} + \nabla_\nu R^\rho_{\sigma\lambda\mu} = 0\end{align} -
Door contractie leidt dit tot de zogenaamde gecontracteerde Bianchi-identiteit:
\begin{align}\nabla^\mu\left( R_{\mu\nu} - \tfrac{1}{2} g_{\mu\nu} R\right) = 0\end{align} - Deze gecontracteerde versie is cruciaal voor de consistentie van de Einstein-veldvergelijkingen.
-
Ze impliceert dat de afgeleide van de tensor
\(G_{\mu\nu} = R_{\mu\nu} - \tfrac{1}{2} g_{\mu\nu} R\) nul is:
\begin{align}\nabla^\mu G_{\mu\nu} = 0\end{align} - Dit correspondeert met het behoud van energie en impuls in gebogen ruimte-tijd.
Intuïtief
De Riemann-tensor is niet zomaar een willekeurig object, hij moet aan diepere structurele regels voldoen. De Bianchi-identiteit is zo’n regel: een soort interne consistentie van de kromming van ruimte-tijd.
Als je met vectoren werkt, zeg je: “de divergentie van de kracht is nul als er geen bronnen zijn”. Bij tensors zeg je iets vergelijkbaars: de structuur van de kromming is zó georganiseerd dat bepaalde combinaties ervan altijd verdwijnen, en dat betekent o.a. dat de Einstein-vergelijkingen niet zomaar energie uit het niets laten verschijnen.
De gecontracteerde Bianchi-identiteit is essentieel omdat ze garandeert dat de Einstein-tensor \(G_{\mu\nu}\) automatisch voldoet aan een behoudswet: energie en impuls blijven behouden in elke kromme ruimte-tijd.
Tabeloverzicht:
| Grootheid | Betekenis |
|---|---|
| Bianchi-identiteit | Structurele symmetrie van Riemann-tensor |
| Gecontracteerde Bianchi-identiteit | Impliceert \(\nabla^\mu G_{\mu\nu} = 0\) |
| Einstein-tensor \(G_{\mu\nu}\) | \(G_{\mu\nu} = R_{\mu\nu} - \tfrac{1}{2} g_{\mu\nu} R\) |
| Fysieke betekenis | Garandeert behoud van energie en impuls in gekromde ruimte |
2.12.3 De Ricci-Tensor
In het volgende hoofdstuk zullen we ons bezighouden met de energie-impuls-tensor. Deze tensor is een rang-2 tensor. Om deze reden moeten we de rang-4 Riemann-tensor aanpassen naar een rang-2 tensor, die de Ricci-tensor wordt genoemd. Dit kan worden gedaan door de covariante Riemann-tensor te vermenigvuldigen met een rang-2 contravariante metrische tensor, waarbij twee gemeenschappelijke indices worden gedeeld. Dit proces wordt contractie genoemd.
Door contractie van de eerste en derde index van de Riemann-tensor verkrijgen we de Ricci-tensor:
De Ricci-tensor is symmetrisch:
2.12.4 De Ricci-Scalar
Door de Ricci-tensor te vermenigvuldigen met de metrische tensor met dezelfde indices, wordt de Ricci-tensor gecontracteerd, wat resulteert in de Ricci-scalar:
Deze scalaire kromming \(R\) is het spoor van de Ricci-tensor.
Deze tensoren, de Ricci-tensor en Ricci-scalar, vormen samen met de metriek \(g_{\mu\nu}\) de bouwstenen van de veldvergelijkingen van Einstein. De Bianchi-identiteit garandeert bovendien de behoudswetten die uit deze vergelijkingen voortvloeien.
2.12.5 Kernpunten en Intuïtie
-
De Ricci-tensor \(R_{\mu\nu}\) is een contractie van de Riemann-tensor:
\begin{align} R_{\mu\nu} = R^{\lambda}_{\mu\lambda\nu} \end{align} - Hij bevat informatie over hoe volumes veranderen in gekromde ruimte-tijd (denk aan uitrekking of samentrekking van geodetenbundels).
-
De Ricci-scalar \(R\) is een verdere contractie:
\begin{align} R = g^{\mu\nu} R_{\mu\nu} \end{align} - Deze grootheden zijn coördinaatonafhankelijk en vormen de basis van de Einstein-veldvergelijkingen.
- Waar de Riemann-tensor lokale kromming volledig beschrijft, zijn Ricci-tensor en scalar vooral samenvattende maatstaven van kromming op grotere schaal.
Intuïtief
Denk aan een groep deeltjes in vrije val in een klein volume. Als dat volume begint te krimpen of uitrekken naarmate de tijd verstrijkt, komt dat door de Ricci-tensor.
Waar de Riemann-tensor zegt hoe kromming richtingen verdraait, zegt de Ricci-tensor:
- “hoe beïnvloedt de kromming de vorm van een stof- of lichtstraalbuidel?”
De Ricci-scalar kun je zien als een samenvatting in één getal van hoe “gekromd” de ruimte-tijd is op een bepaald punt.
Je zou kunnen zeggen:
- Riemann = volledig beeld van kromming
- Ricci-tensor = effect op volumes
- Ricci-scalar = totale kromming samengevat in één waarde
Tabeloverzicht:
| Grootheid | Definitie | Interpretatie |
|---|---|---|
| Riemann-tensor | \(R_{\sigma\mu\nu}^{\rho}\) | Volledige lokale kromming |
| Ricci-tensor | \(R_{\mu\nu} = R^{\lambda}_{\mu\lambda\nu}\) | Volumeverandering / samengevatte kromming |
| Ricci-scalar | \(R = g^{\mu\nu} R_{\mu\nu}\) | Totale kromming in één getal |
2.13 Energie-Impuls Tensor
Het uiteindelijke doel van de algemene relativiteitstheorie is het opstellen van een relatie tussen de geometrie van de ruimte-tijd en de materie of energie die deze vervormt. Daarvoor is een geschikt wiskundig object nodig dat de inhoud van de ruimte-tijd beschrijft: de energie-impuls-tensor.
In de speciale relativiteitstheorie is reeds aangetoond dat massa, energie en impuls onderling verbonden zijn. Deze relatie wordt uitgedrukt via de bekende energie-impulsvergelijking:
Dit suggereert dat, binnen de algemene relativiteit, niet alleen massa, maar ook energie en impuls bijdragen aan het zwaartekrachtsveld.
In de Newtoniaanse limiet beschrijft de vergelijking van Poisson het zwaartekrachtsveld \(\Phi\), opgewekt door een massadichtheid \(\rho\) (zie: in Appendix 7 vergelijking (20)):
Dit roept de vraag op: wat is het relativistische equivalent van de energiedichtheid? Is het een scalar, een vector, of iets anders?
2.13.1 Transformatie-eigenschappen: het voorbeeld van een stofwolk
Beschouw een volume \(dx \cdot dy \cdot dz\) gevuld met niet-interagerende deeltjes die in rust zijn ten opzichte van elkaar, een zogenaamde stofwolk. In het ruststelsel S van deze wolk is de energiedichtheid:
In een ander referentiekader S’, dat met een snelheid \(v\) in de x-richting beweegt, levert de Lorentz-transformatie:
- Massa: \(m_0 \rightarrow m_0 \gamma\),
- Dichtheid: \(n_0 \rightarrow n_0 \gamma\) (wegens lengtecontractie),
- Dus: \(\rho = \rho_0 \gamma^2\).
Aangezien \(\rho\) niet invariant is, kan het geen scalar zijn. Het is ook geen component van een viervector, want dan zou het slechts lineair met \(\gamma\) transformeren. De transformatie \(\gamma^2\) suggereert dat \(\rho\) zich gedraagt als een component van een rank-2 tensor, namelijk als de tt-component van een symmetrische tensor.
2.13.2 De energie-impuls-tensor van stof
De viersnelheidsvector van de stofwolk in S’ is:
Dit suggereert dat \(\rho\) de tt-component is van een rank-2 tensor van de vorm:
Deze tensor vormt de schakel tussen materie/energie en de kromming van de ruimte-tijd in de veldvergelijkingen van Einstein. In latere hoofdstukken zullen we zien hoe deze tensor voorkomt aan de rechterkant van Einsteins vergelijkingen.
2.13.3 Fysische Betekenis van de Energie-Impuls-Tensor
De energie-impuls-tensor is een tweede-orde tensor, wat betekent dat hij 16 componenten bevat in de vorm van een 4×4-matrix:
Zoals eerder besproken, representeert \(T^{tt}\) de energiedichtheid, oftewel de dichtheid van relativistische massa. Maar wat betekenen de andere 15 componenten fysisch?
2.13.4 Tijd-ruimte-componenten: energiestroom
Laten we eerst de component \(T^{tx}\) bekijken. Uit de definitie:
We kunnen dit herschrijven als:
\(T^{tx}\) is de energieflux per oppervlakte-eenheid per tijdseenheid in de x-richting.
Op dezelfde manier representeren:
- \(T^{ty}\): de energiestroom in de y-richting
- \(T^{tz}\): de energiestroom in de z-richting
Omdat \(T^{\mu\nu}\) symmetrisch is, \(T^{\mu\nu} = T^{\nu\mu}\), geldt:
2.13.5 Tijd-ruimte-componenten: impulsstromen (stress)
Beschouwen we nu de componenten met beide indices ruimtelijk, dus \(T^{kl}\) met \(k,l \in \{x,y,z\}\). Dan geldt:
Opnieuw kunnen we dit schrijven als:
Bijvoorbeeld:
- \(T^{xz}\): flux van z-impuls in x-richting
- \(T^{xy}\): flux van y-impuls in x-richting
- \(T^{zz}\): flux van z-impuls in z-richting (druk)
Omdat de tensor symmetrisch is, geldt ook:
2.13.6 Samenvattend:
- \(T^{tt}\) = energiedichtheid
- \(T^{ti}\) of \(T^{it}\) = energiestroom in richting \(i\)
- \(T^{ij}\) = flux van impuls \(j\) in richting \(i\) (stress, druk en schuifspanning)
Deze interpretatie maakt duidelijk waarom \(T^{\mu\nu}\) het juiste object is om de volledige fysische inhoud van een systeem te beschrijven, van energie- en massadichtheid tot impulsstromen en spanningen, en dus als bron van zwaartekracht in de algemene relativiteit fungeert.
2.13.7 Covariante Differentiatie van de Energie-Impuls-Tensor
In de platte ruimte-tijd van de Speciale Relativiteitstheorie kunnen de wetten van behoud van energie en impuls, oftewel het feit dat energie en impuls niet verloren gaan of ontstaan, wiskundig worden uitgedrukt als:
Deze uitdrukking is een direct gevolg van Noether's stelling, toegepast op de translatie-invariantie van ruimte en tijd: de wetten van de natuur veranderen niet als we het systeem een stukje verplaatsen in ruimte of tijd. Deze symmetrie leidt tot behoud van impuls en energie.
2.13.8 Van Platte naar Gekromde Ruimte-tijd
In de algemene relativiteitstheorie beschrijven we fysica in een gekromde ruimte-tijd, waarin gewone afgeleiden niet volstaan. We vervangen daarom de partiële afgeleide door de covariante afgeleide:
Deze vergelijking is een tensorvergelijking en is daarom algemeen covariant, dat wil zeggen, geldig in elk coördinatenstelsel, vlak of gekromd. Dit maakt het een natuurlijke kandidaat voor een fundamenteel behoudsprincipe binnen de algemene relativiteit.
2.14 Einstein Tensor
De Poisson-vergelijking voor het zwaartekrachtsveld in de klassieke (Newtoniaanse) mechanica luidt als volgt (zie vergelijking Appendix 7 vergelijking 20):
Ons doel is nu het vinden van een relativistische generalisatie van deze vergelijking. Zoals we in hoofdstuk 2.13.3 hebben gezien, wordt de klassieke massadichtheid \(\rho\) in de algemene relativiteit vervangen door de energie-impuls-tensor \(T^{\mu\nu}\). Deze tensor beschrijft niet alleen massa, maar ook energie, impuls en druk, alle vormen van energie-inhoud van de ruimte-tijd.
Het ligt dan voor de hand om te veronderstellen dat de relativistische veldvergelijking van Einstein de volgende vorm moet hebben:
2.14.1 Eisen aan de Einstein-tensor
Op basis van de fysische en wiskundige vereisten waaraan de veldvergelijking moet voldoen, moet de Einstein-tensor \(G^{\mu\nu}\) aan de volgende eigenschappen voldoen:
- Hij moet verdwijnen in vlakke ruimte-tijd, zoals \(\mathbf{\vec{g}} = 0\) in de afwezigheid van massa.
- Hij moet de ruimte-tijdkromming beschrijven op een manier die lineair afhankelijk is van de Riemann-krommingstensor.
- Hij moet een symmetrische rang-2 tensor zijn, net als \(T^{\mu\nu}\).
- Hij moet een nulpuntdivergentie hebben: \(\nabla_\nu G^{\mu\nu} = 0\), zodat de wet van behoud van energie en impuls behouden blijft \(\nabla_\nu T^{\mu\nu} = 0\).
- In de Newtoniaanse limiet moet hij terugvallen op de Poisson-vergelijking: \(\nabla^2 \Phi = 4\pi G \rho\).
In het volgende hoofdstuk zullen we de concrete vorm van de Einstein-tensor afleiden, die voldoet aan al deze voorwaarden.
2.14.2 Eerste Poging met de Ricci-Tensor als Oplossing
Zoals we in hoofdstuk 2.8 hebben gezien, is het zwaartekrachts-potentiaal \(\Phi\) gekoppeld aan de 00-component van de metriek via:
Het lijkt dan logisch om te zoeken naar een tensor die, net als de Laplaciaan, tweede afgeleiden van de metriek bevat. De Riemann-tensor voldoet hieraan, en is bovendien de enige bekende tensor die de ruimte-tijdkromming op fundamentele wijze beschrijft.
Omdat we een rang-2 tensor nodig hebben (zoals vereist in de Einstein-veldvergelijking), is het zinvol om eerst te kijken naar de gecontracteerde vorm van de Riemann-tensor: de Ricci-tensor. We herinneren ons:
In de Newtoniaanse limiet, voor een zwak en statisch gravitatieveld, draagt slechts één term bij aan \(R_{00}\). We vinden:
Slechts één term van eerste orde blijft er over in \(R_{00}\):
Hierbij kan de komma-notatie expliciet worden geschreven als:
waar \(\partial_i\) de partiële afgeleide naar de ruimtelijke coördinaat \(x^i\) voorstelt.
Gebruikmakend van het eerder afgeleide resultaat voor het Christoffel-symbool in deze benadering:
Dit resultaat suggereert dat een veldvergelijking van de vorm:
Einstein was in 1915 inderdaad aanvankelijk overtuigd van deze vergelijking.
Hiermee loste hij zelfs het al jaren onopgeloste probleem van de precessie
van het perihelium van Mercurius op. In een brief schreef hij enthousiast:
“Een paar dagen was ik buiten mezelf van vreugdevolle opwinding.”
Toch moest hij deze eerste poging uiteindelijk verwerpen. De reden was dat de Ricci-tensor in het algemeen geen nulpuntdivergentie heeft, terwijl de energie-impuls-tensor \(T_{\mu\nu}\) dat wél heeft, \(\nabla^\nu T_{\mu\nu} = 0\). Hierdoor kon deze vorm niet voldoen aan het vereiste behoud van energie en impuls.
2.14.3 Tweede Poging
Er bestaat een tensor die nauw verwant is aan de Ricci-tensor en die geschikt is als linkerkant van de Einstein-veldvergelijkingen: de Einstein-tensor. Deze wordt gedefinieerd als:
Deze tensor voldoet alvast aan meerdere vereisten:
- Hij is symmetrisch, zoals vereist door de symmetrie van \(T^{\mu\nu}\).
- Hij is van rang 2.
- Hij beschrijft de ruimte-tijdkromming, aangezien hij direct is opgebouwd uit de Ricci-tensor en dus indirect uit de Riemann-tensor.
Wat nog aangetoond moet worden, is dat de covariante divergentie van de Einstein-tensor nul is:
We leiden dit resultaat af met behulp van de Bianchi-identiteit, die luidt:
De eerste term wordt:
Door gebruik te maken van de definitie van de Ricci-tensor \(R^{\mu\nu} = g^{\mu\beta} g^{\nu\sigma} R_{\beta\sigma}\) (stap 3) en door de indices te hernoemen (stap 4), krijgen we:
Dit kan worden herschreven als:
2.14.4 Conclusie
De Einstein-tensor \(G^{\mu\nu}\) is de juiste keuze voor de linkerkant van de veldvergelijking. Hij is symmetrisch, opgebouwd uit de ruimte-tijdkromming, en voldoet aan het behoud van energie en impuls door zijn nuldivergentie. Daarmee is de vergelijking:
2.15 Einstein-Veldvergelijkingen
In de vorige twee hoofdstukken hebben we de twee grootheden afgeleid die de kern vormen van de veldvergelijkingen in de algemene relativiteitstheorie:
- De Einstein-tensor \(G^{\mu\nu}\), die de ruimte-tijdkromming beschrijft, en
- De energie-impuls-tensor \(T^{\mu\nu}\), die de materie-energie-inhoud van de ruimte-tijd representeert.
Deze twee grootheden zijn gekoppeld in de vorm:
2.15.1 Doel: herstel van Newton in de zwakveldlimiet
Om de waarde van \(\kappa\) te vinden, eisen we dat deze vergelijking in de Newtoniaanse limiet (zwakke, statische velden en lage snelheden) reduceert tot de klassieke zwaartekrachtwet van Newton. Dit zorgt ervoor dat de algemene relativiteitstheorie in overeenstemming is met de klassieke theorieën in hun toepassingsgebied.
2.15.2 Alternatieve formulering van de veldvergelijking
Einstein heeft de veldvergelijkingen ook in een alternatieve, equivalente vorm geschreven. Deze luidt:
- \(\chi\) een constante is (verwant aan \(\kappa\)),
- \(T = T^{\sigma}_{\sigma}\) de spoortensor (trace) van \(T_{\mu\nu}\) is, oftewel de contractie van de tensor,
- en de rechterkant als geheel weer een tensor van rang 2 vormt.
Deze formulering werd door Einstein gebruikt in zijn beroemde artikel “Die Feldgleichungen der Gravitation”, ingediend op 25 november 1915 bij de Königlich Preußische Akademie der Wissenschaften. Daarin schrijft hij:
„Ist in dem betrachteten Raume ‘Materie’ vorhanden, so tritt deren Energietensor auf der rechten Seite von (2) [...] auf. Wir setzen
2.15.2.1 Samenvattend
De volledige vorm van de veldvergelijkingen van Einstein luidt dus:
2.15.2.2 De Alternatieve Vorm van Einsteins Vergelijking
We beginnen met de standaardvorm van de veldvergelijking:
2.15.2.3 Conclusie
De standaardvorm en de alternatieve vorm van Einsteins vergelijkingen zijn volledig equivalent. Ze benadrukken verschillende aspecten: de ene de rol van de Einstein-tensor \(G_{\mu\nu} = R_{\mu\nu} - \tfrac{1}{2} g_{\mu\nu} R\), de andere de decompositie in termen van \(R_{\mu\nu}\), \(g_{\mu\nu}\) en het spoor \(T\).
Deze afleiding bevestigt de consistentie van Einsteins veldvergelijking en zijn equivalentie met de alternatieve formulering die in zijn originele publicatie werd voorgesteld. Beide vormen leiden tot dezelfde fysische voorspellingen, maar de alternatieve notatie wordt vaak gebruikt vanwege haar symmetrie en eenvoud in toepassingen.
2.15.3 Newtoniaanse Limiet
In het vorige hoofdstuk zagen we al dat in de limiet van zwakke velden en lage snelheden de \(R_{00}\)-component van de Riemann-tensor benaderd kan worden als:
In deze Newtoniaanse limiet is de enige niet-verwaarloosbare component van de energie-impuls-tensor \(T^{\mu\nu}\) de component \(T^{00} = \rho c^{2}\). Dit volgt uit de uitdrukking:
We passen nu de 00-component van de Einstein-vergelijking toe:
We kunnen nu de Einstein-veldvergelijkingen formuleren in hun standaard- en alternatieve vormen:
2.15.3.1 Opmerking 1:
De constante \(\kappa = \dfrac{8\pi G}{c^{4}}\) heeft een extreem kleine waarde:
2.15.3.2 Opmerking 2:
Ondanks het relatief eenvoudige uiterlijk van de Einsteinvergelijkingen, zijn ze in werkelijkheid uiterst complex. Voor een gegeven verdeling van materie en energie (in de vorm van \(T^{\mu\nu}\)), vormen de vergelijkingen een systeem van tien gekoppelde, niet-lineaire, tweede-orde partiële differentiaalvergelijkingen voor de metriek \(g^{\mu\nu}\). Deze tien vergelijkingen corresponderen met de tien onafhankelijke componenten van de symmetrische metriek.
2.15.3.3 Opmerking 3:
De niet-lineariteit van de Einsteinvergelijkingen heeft een diepe fysische betekenis. Ze reflecteert het zelf-referentiële karakter van de zwaartekracht: de ruimte-tijd beïnvloedt materie en energie, maar wordt tegelijk ook beïnvloed door diezelfde materie en energie. Zoals Kevin Brown opmerkt in Reflection on Relativity:
“De zelf-referentiële aard van de metrische veldvergelijkingen komt ook tot uiting in hun niet-lineariteit. Dit is onvermijdelijk voor een theorie waarin de metrische relaties tussen entiteiten hun 'posities' bepalen, en die posities op hun beurt de metriek beïnvloeden.”
De niet-lineariteit impliceert ook de mogelijkheid van interactie tussen zwaartekrachtvelden zelf (zoals via graviton-uitwisseling), wat bijvoorbeeld in het lineaire Maxwell-formalisme van elektromagnetisme niet mogelijk is voor fotonen.
2.15.3.4 Opmerking 4:
De Einsteinvergelijkingen leggen slechts zes onafhankelijke beperkingen op aan de tien componenten van de metriek \(g^{\mu\nu}\). De resterende vier vrijheidsgraden hangen samen met de vrijheid om coördinaten te kiezen: we kunnen vier willekeurige functies specificeren via de coördinaten \(x^{\alpha}(P)\). Deze overbepaling is een direct gevolg van het feit dat de Einsteintensor \(G^{\mu\nu}\) een nulpuntdivergentie heeft: \(\nabla_{\mu} G^{\mu\nu} = 0\).
2.15.4 Kernpunten en Intuïtie
- De Einstein-veldvergelijkingen koppelen de ruimte-tijdkromming aan de energie-impuls-inhoud:
\begin{align} R_{\mu\nu} - \tfrac{1}{2} g_{\mu\nu} R = \kappa T_{\mu\nu} \end{align}
- De linkerkant, \(G_{\mu\nu} = R_{\mu\nu} - \tfrac{1}{2} g_{\mu\nu} R = \kappa T_{\mu\nu}\), is de Einstein-tensor, die de geometrie encodeert.
- De rechterkant bevat de energie-impuls-tensor \(T_{\mu\nu}\), die massa, energie, druk en stromen beschrijft.
- De constante \(\kappa\) wordt afgeleid door de vergelijkingen te laten overeenkomen met Newtons gravitatiewet in de zwakke-veld-limiet:
\begin{align} \kappa = \frac{8\pi G}{c^{4}} \end{align}
- Een alternatieve, volledig equivalente formulering van de veldvergelijking is:
\begin{align} R_{\mu\nu} = \kappa \left( T_{\mu\nu} - \tfrac{1}{2} g_{\mu\nu} T \right) \end{align}waarin \(T = g^{\mu\nu} T_{\mu\nu}\) de trace van de energie-impulstensor is.
- Door contractie van beide zijden van de standaardvorm volgt \(R = -\kappa T\), wat consistent is met de alternatieve formulering.
Intuïtief
Stel je ruimte-tijd voor als een flexibel maar stug vierdimensionaal weefsel. De Einsteinvergelijkingen vertellen hoe dat weefsel vervormd wordt door de aanwezigheid van massa en energie.
Net als een matras die indeukt onder een zware kogel, vervormt ruimte-tijd rond massa’s. Maar in plaats van een duw of kracht, is die vervorming een geometrisch effect dat bepaalt hoe objecten bewegen, ook als ze "vrij" vallen.
De vergelijking \(G_{\mu\nu} = \kappa T_{\mu\nu}\) zegt dan:
- Wat er in de ruimte-tijd aanwezig is (materie, energie, straling),
- bepaalt hoe de ruimte-tijd zelf eruitziet (kromt, strekt, draait).
Bij zwakke velden en lage snelheden volgt hieruit automatisch de klassieke zwaartekrachtvergelijking van Newton, een cruciale test voor elke relativistische theorie.
2.15.5 Tabel: Belangrijke grootheden in de Einstein-veldvergelijkingen
| Grootheid | Betekenis / Rol |
|---|---|
| \(R_{\mu\nu}\) | Ricci-tensor: samengevatte kromming |
| \(R\) | Ricci-scalar: totale kromming |
| \(g_{\mu\nu}\) | Metriek: meetstructuur van ruimte-tijd |
| \(G_{\mu\nu} = R_{\mu\nu} - \frac{1}{2} g_{\mu\nu} R\) | Einstein-tensor: meet geometrische vervorming |
| \(T_{\mu\nu}\) | Energie-impulstensor: verdeling van energie en materie |
| \(T = g^{\mu\nu} T_{\mu\nu}\) | Spoor (trace) van \(T_{\mu\nu}\): scalaire energiedichtheid |
| \(\kappa = \frac{8\pi G}{c^4}\) | Koppelingsconstante tussen geometrie en fysica |
2.16 Samenvatting van de Eindformule voor de Algemene Relativiteitstheorie
In de voorgaande hoofdstukken hebben we stap voor stap de afleiding van de Einstein-veldvergelijkingen (EVV) besproken. Daarbij kwamen alle noodzakelijke bouwstenen aan bod, zoals de Riemann-tensor, de Ricci-tensor, de Ricci-scalar, de energie-impuls-tensor, en het gebruik van covariante afgeleiden. In dit afsluitende hoofdstuk vatten we het eindresultaat samen en lichten we de fysische betekenis ervan toe.
2.16.1 Het fundamentele inzicht van Einstein
Einsteins centrale idee was dat zwaartekracht géén kracht is in de klassieke zin, maar het gevolg van de kromming van ruimte-tijd. Deze kromming wordt veroorzaakt door de aanwezigheid van massa en energie. Zijn doel was een wiskundige formule te vinden die deze relatie beschrijft: hoe massa en energie de geometrie van ruimte-tijd beïnvloeden.
De algemene vorm van de veldvergelijking
Zonder de volledige afleiding opnieuw te doorlopen, presenteren we hier het eindresultaat van Einsteins theorie:
De linkerkant van deze vergelijking beschrijft de geometrie (de kromming) van ruimte-tijd, terwijl de rechterkant de inhoud van de ruimte (massa, energie en impuls) representeert.
In deze vergelijking staat \(c\) voor de lichtsnelheid (\(2.99792458 \times 10^8 \, \text{m/s}\)) en \(G\) is de bekende zwaartekrachtsconstante (\(6.674 \times 10^{-11} \, \text{m}^3\text{kg}^{-1} \text{s}^{-2}\)).
2.16.2 Vacuüm: buiten een massa
In een gebied zonder massa of energie geldt \(T_{\mu\nu} = 0\). De veldvergelijking reduceert dan tot:
2.16.3 Uitleg van de gebruikte objecten
De indexen \(\mu\) en \(\nu\) lopen van 0 tot 3 en verwijzen naar de vier dimensies van de ruimte-tijd: tijd (0) en ruimte (1 = x, 2 = y, 3 = z). Vergelijking (\ref{eq:R459}) bevat dus 16 componentvergelijkingen:
Door symmetrie (namelijk \(R_{\mu\nu} = R_{\nu\mu}\)) zijn er slechts 10 onafhankelijke.
De Ricci-tensor \(R_{\mu\nu}\) wordt vaak in matrixvorm genoteerd als:
De metrische tensor \(g_{\mu\nu}\), die de meetkundige structuur van ruimte-tijd bevat, heeft eveneens 10 onafhankelijke componenten en bepaalt de ruimte-tijdgeometrie volledig:
De Ricci-scalar \(R\) volgt uit de contractie van de Ricci-tensor met de inverse metriek: \[R = g^{\mu\nu} R_{\mu\nu}\] Alle elementen aan de linkerkant van vergelijking (\ref{eq:R459}) beschrijven de geografie van de beschouwde ruimte-tijd. Aan de rechterkant vinden we de energie-impuls-tensor \(T_{\mu\nu}\), die alle informatie over materie en energie in het systeem bevat:
Hierin staat \(T_{00}\) voor de energiedichtheid, \(T_{0i}\) voor de energiestroom en \(T_{ij}\) voor de spanningen en impulsstromen in de ruimtelijke richtingen.
2.16.4 Bepaling van \(R_{\mu\nu}\)
De Ricci-tensor wordt berekend via contractie van de Riemann-tensor:
2.16.5 De Schwarzschild-oplossing
In 1915 vond Karl Schwarzschild een exacte oplossing van de veldvergelijkingen in vacuüm rondom een bolsymmetrische massa. Dit leidde tot de bekende Schwarzschild-metriek (zie hoofdstuk 3):
De Schwarzschild-oplossing is bijzonder belangrijk omdat zij experimenteel verifieerbare voorspellingen doet, zoals de ombuiging van licht en de perihelium-precessie van Mercurius.
De metrische tensor bestaat dan uit de elementen:
Dus omdat de Schwarzschild-vergelijking buiten een massa wordt gebruikt, wordt de rechterkant van de Einstein-veldvergelijkingen nul (\(T_{\mu\nu} = 0\)). Hierdoor gaan de veldvergelijkingen dan over in vergelijking (\ref{eq:R460}), en omdat \(R\) is afgeleid van \(R_{\mu\nu}\), kan vergelijking (\ref{eq:R460}) alleen nul zijn wanneer \(R_{\mu\nu} = 0\). Dus de enige relevante vergelijking is \(R_{\mu\nu} = 0\). Zoals eerder vermeld, is de tensor \(R_{\mu\nu}\) opgebouwd uit Christoffel-symbolen en hun afgeleiden. Alle relevante Christoffel-symbolen voor deze metriek hebben we afgeleid en samengevat in Appendix 1.2.
De Schwarzschild-vergelijking gebruikt het polaire of sferische coördinatenstelsel om de volledige ruimte-tijd te beschrijven; echter, door behoud van impulsmoment vindt fysieke beweging plaats in één vlak. Door het juiste polaire coördinatenstelsel te kiezen, kan dit vlak zo worden gedraaid dat het equatoriale vlak samenvalt met het onderzochte oppervlak. In dat geval wordt de hoek \(\theta = \pi/2\), waarbij de metrische tensor verder vereenvoudigd tot:
2.16.5.1 Opmerking 1
In zijn document gebruikt Einstein voor het Christoffel-symbool \(\Gamma_{\mu\nu}^{\rho}\) een tegenovergesteld teken, en ook de Ricci-tensor \(R_{\mu\nu}\) heeft een tegenovergesteld teken voor de derde en vierde term aan de rechterkant van de vergelijking. Voor de metriek hebben wij de zogenaamde (+ - - -) notatie gebruikt, ook wel bekend als de West Coast-conventie.
2.16.5.2 Slotopmerking
De Einstein-veldvergelijkingen vormen een krachtig systeem van 10 gekoppelde, niet-lineaire, partiële differentiaalvergelijkingen. Hoewel ze compact kunnen worden geschreven, zijn ze inhoudelijk rijk en complex.
Ze vormen het vertrekpunt voor het zoeken naar oplossingen (zoals de Schwarzschild-oplossing, kosmologische modellen) en verklaren een breed scala aan natuurkundige fenomenen, van de baan van Mercurius tot de uitdijing van het heelal.
"Massa en energie bepalen de kromming van ruimte-tijd, en de kromming van ruimte-tijd bepaalt de beweging van massa en energie."
2.16.6 Kernpunten en Intuïtie
- Einsteins centrale inzicht: zwaartekracht is geen kracht, maar het gevolg van kromming van ruimte-tijd, veroorzaakt door massa en energie.
- De Einstein-veldvergelijkingen vormen het fundament van de algemene relativiteitstheorie:
\begin{align} R_{\mu\nu} - \frac{1}{2} g_{\mu\nu} R + \lambda g_{\mu\nu} = \frac{8\pi G}{c^4} T_{\mu\nu} \end{align}Voor de meeste praktische toepassingen wordt de kosmologische constante \(\lambda \approx 1.1 \times 10^{-52} \, \text{m}^{-2}\) genegeerd. Dan reduceert de vergelijking tot:\begin{align} R_{\mu\nu} - \frac{1}{2} g_{\mu\nu} R = \frac{8\pi G}{c^4} T_{\mu\nu} \end{align}
- In vacuüm (buiten de materie): \(T_{\mu\nu} = 0\), dus: \(R_{\mu\nu} = 0\) dit zijn de vacüümvergelijkingen, die o.a. leiden tot de Schwarzschild-oplossing
- Elke term op de linkerkant is zuiver geometrisch (afgeleid uit de metriek \(g_{\mu\nu}\)); de rechterkant bevat fysische informatie (energie, massa, druk).
Intuïtief
Stel je een vierdimensionaal elastisch weefsel voor. Materie en energie trekken aan dat weefsel en zorgen voor vervorming. Die vervorming bepaalt hoe objecten zich bewegen, ze volgen de kromming van ruimte-tijd.
De vergelijking zegt:
- Links: "hoe is ruimte-tijd gekromd?"
- Rechts: "wat zit er in de ruimte-tijd dat die kromming veroorzaakt?"
Bijvoorbeeld:
- Een planeet beweegt niet omdat ze wordt "getrokken" door een kracht,
- maar omdat ze een geodeet volgt in een gekromde ruimte-tijd.
De vergelijkingen zijn elegant én krachtig:
- Ze gelden overal (door tensorformaliteit),
- Reduceren tot Newtons zwaartekracht in het juiste limietgeval,
- En voorspellen fenomenen zoals zwaartekrachtsgolven, zwarte gaten en de uitdijing van het heelal.
Tabel: Structuur van de eindvergelijking
| Term | Betekenis |
|---|---|
| \(G_{\mu\nu}\) | Geometrische kant: kromming |
| \(T_{\mu\nu}\) | Fysische kant: energie-inhoud |
| \(\nabla^{\mu} G_{\mu\nu} = 0\) | Structureel behoudprincipe |
| \(\frac{8\pi G}{c^4}\) | Schaalfactor die geometrie en fysica verbindt |
Deze vergelijkingen vormen het sluitstuk van de wiskundige ruggengraat van de algemene relativiteit. Vanaf hier wordt het tijd om oplossingen te zoeken, bijvoorbeeld de Schwarzschild-oplossing of kosmologische modellen.
Tabel: Belangrijke grootheden (samenvatting)
| Grootheid | Betekenis / Rol |
|---|---|
| \(R_{\mu\nu}\) | Ricci-tensor: meet lokale kromming |
| \(R\) | Ricci-scalar: totale schaal van kromming (spoor van \(R_{\mu\nu}\)) |
| \(g_{\mu\nu}\) | Metriek: bepaalt de meetstructuur van ruimte-tijd |
| \(\lambda g_{\mu\nu}\) | Kosmologische constante (vooral relevant op kosmische schaal) |
| \(T_{\mu\nu}\) | Energie-impuls-tensor: beschrijft materie, energie, druk en stroming |
| \(\frac{8\pi G}{c^4}\) | Koppelingsconstante tussen geometrie en fysica |